2018年1月26日金曜日
2017年5月19日金曜日
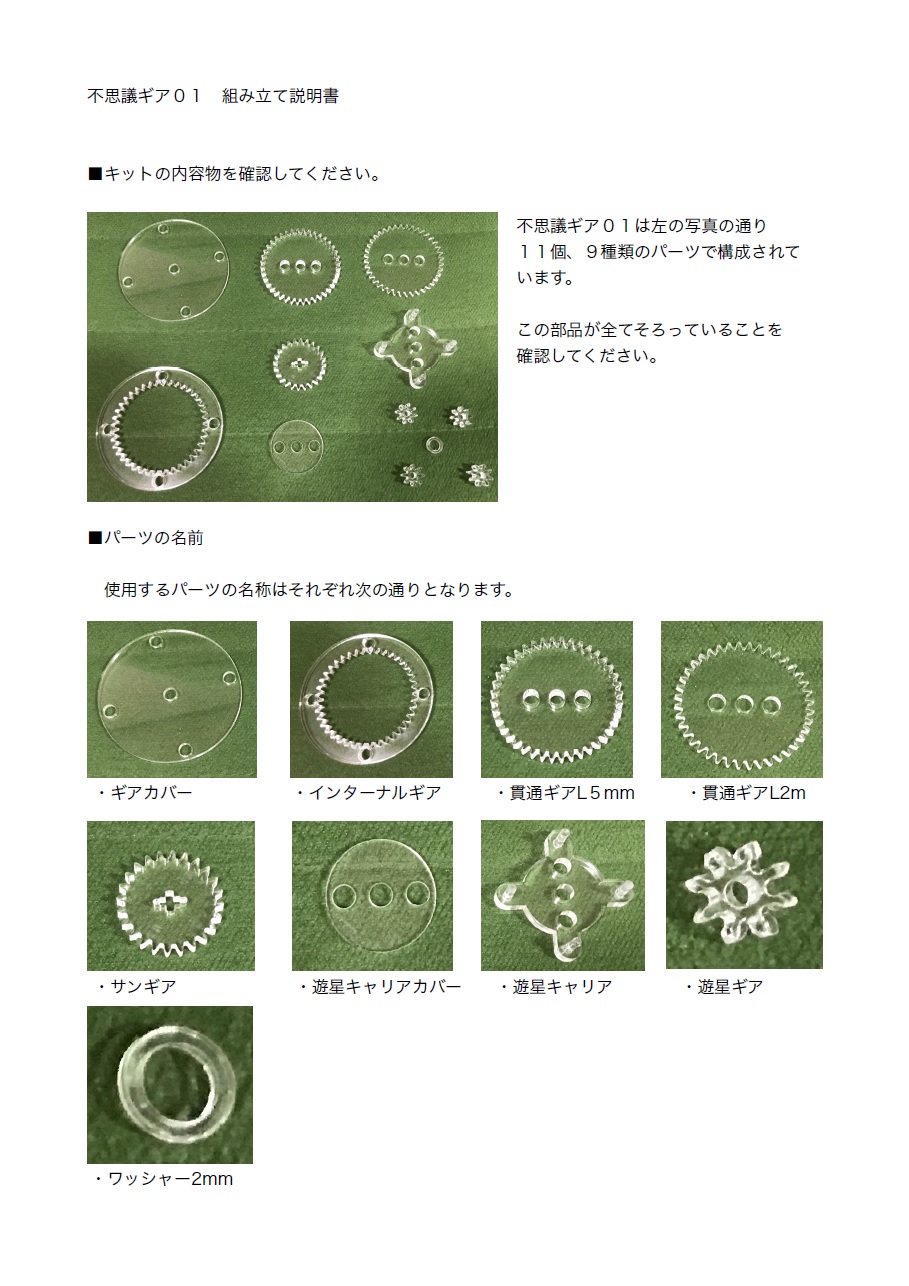
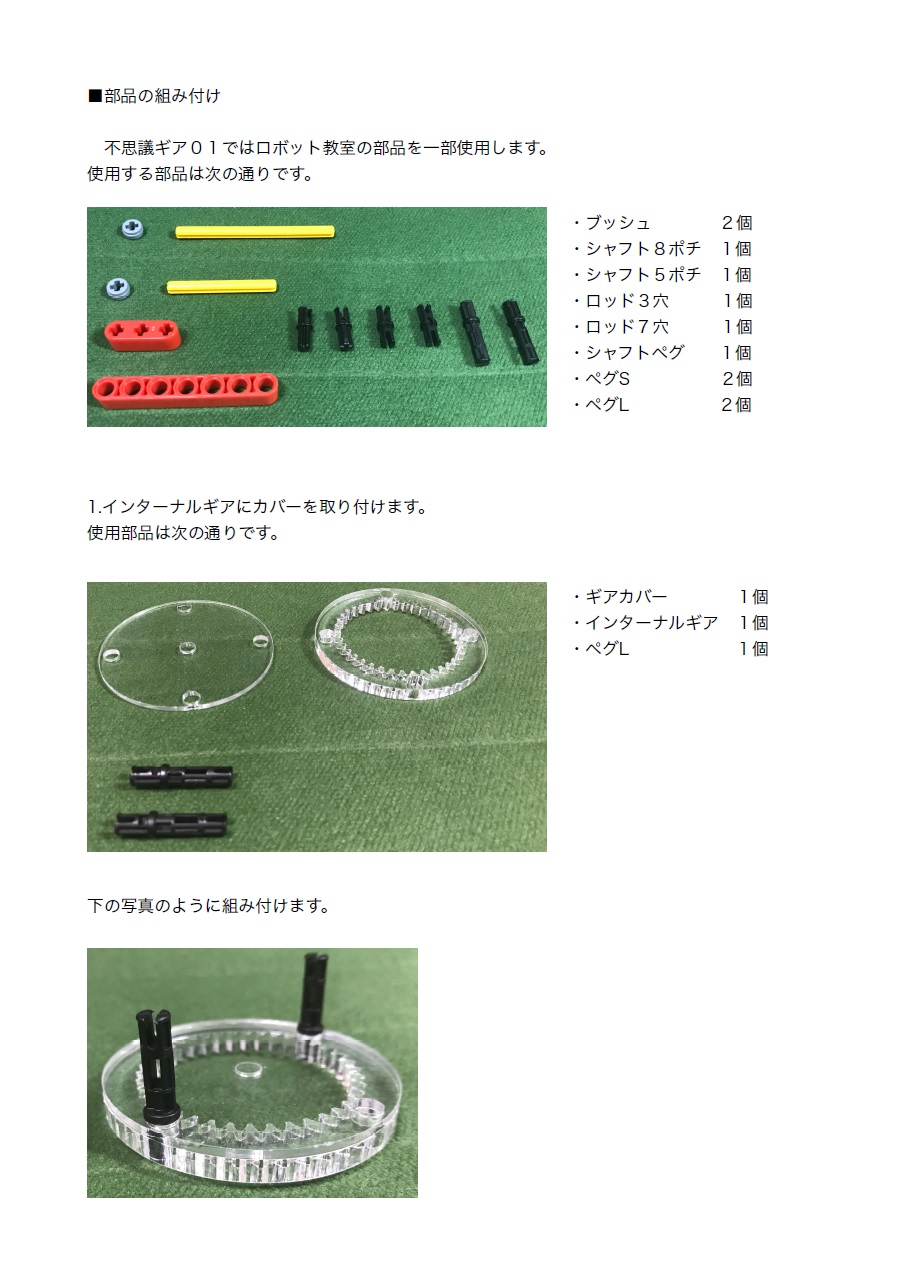
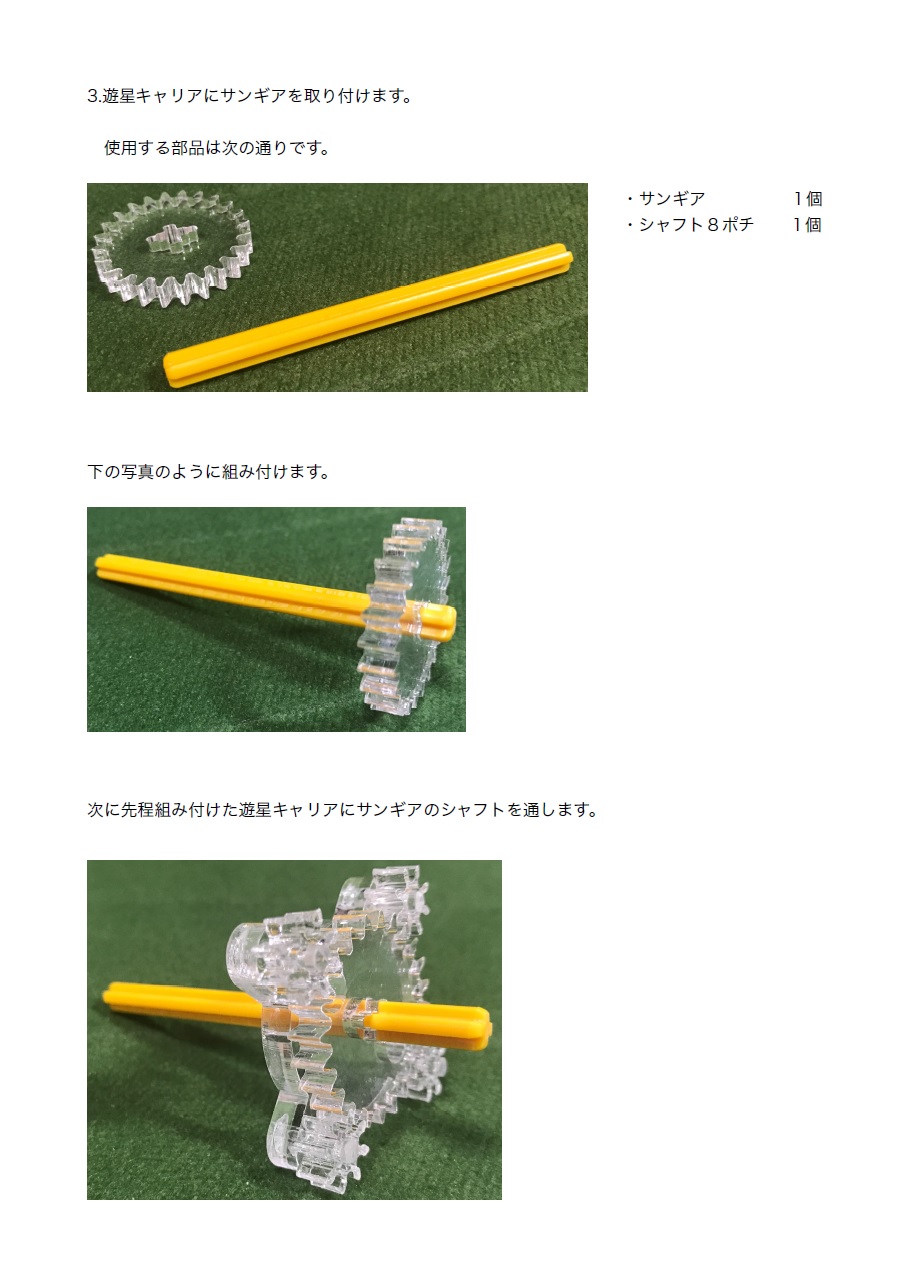
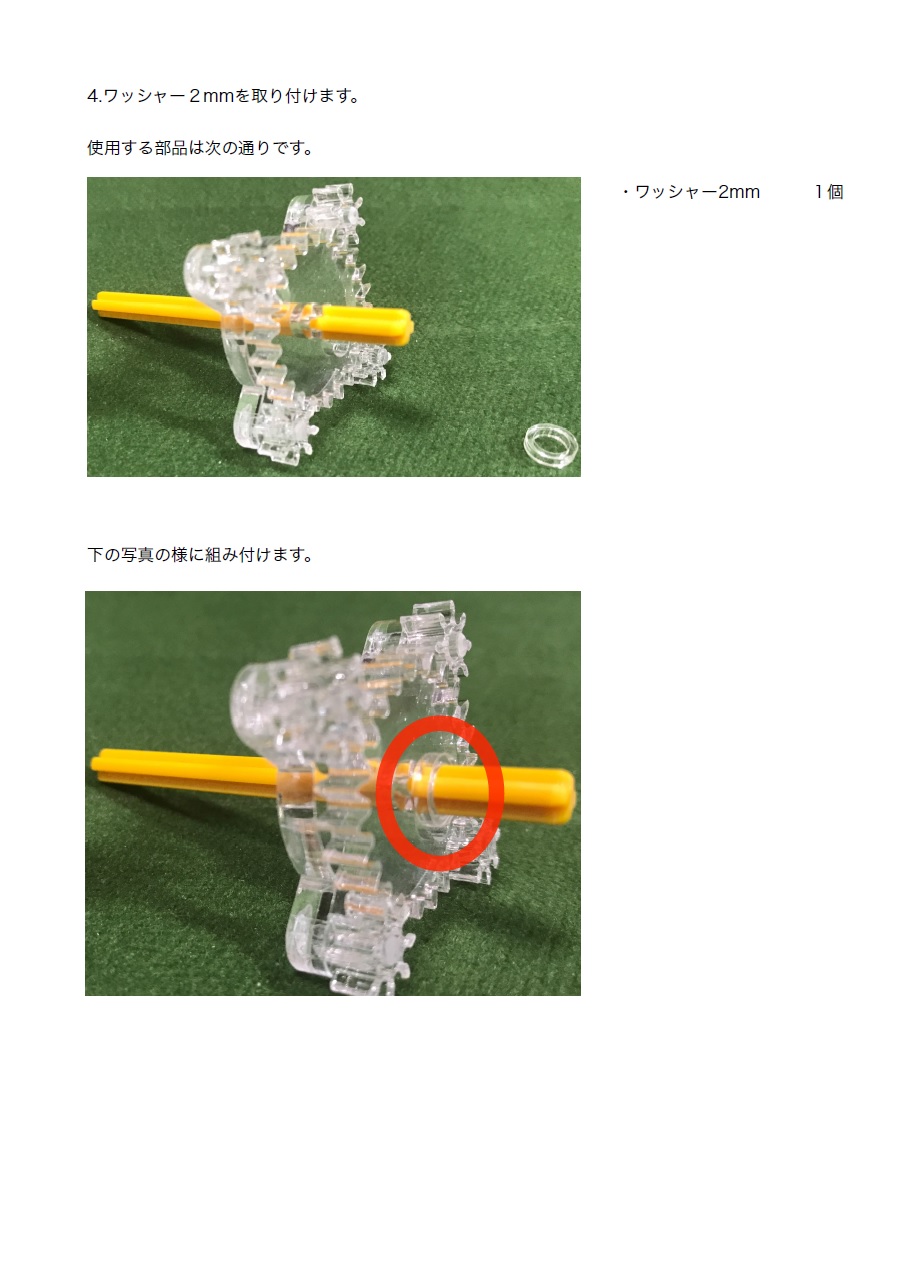
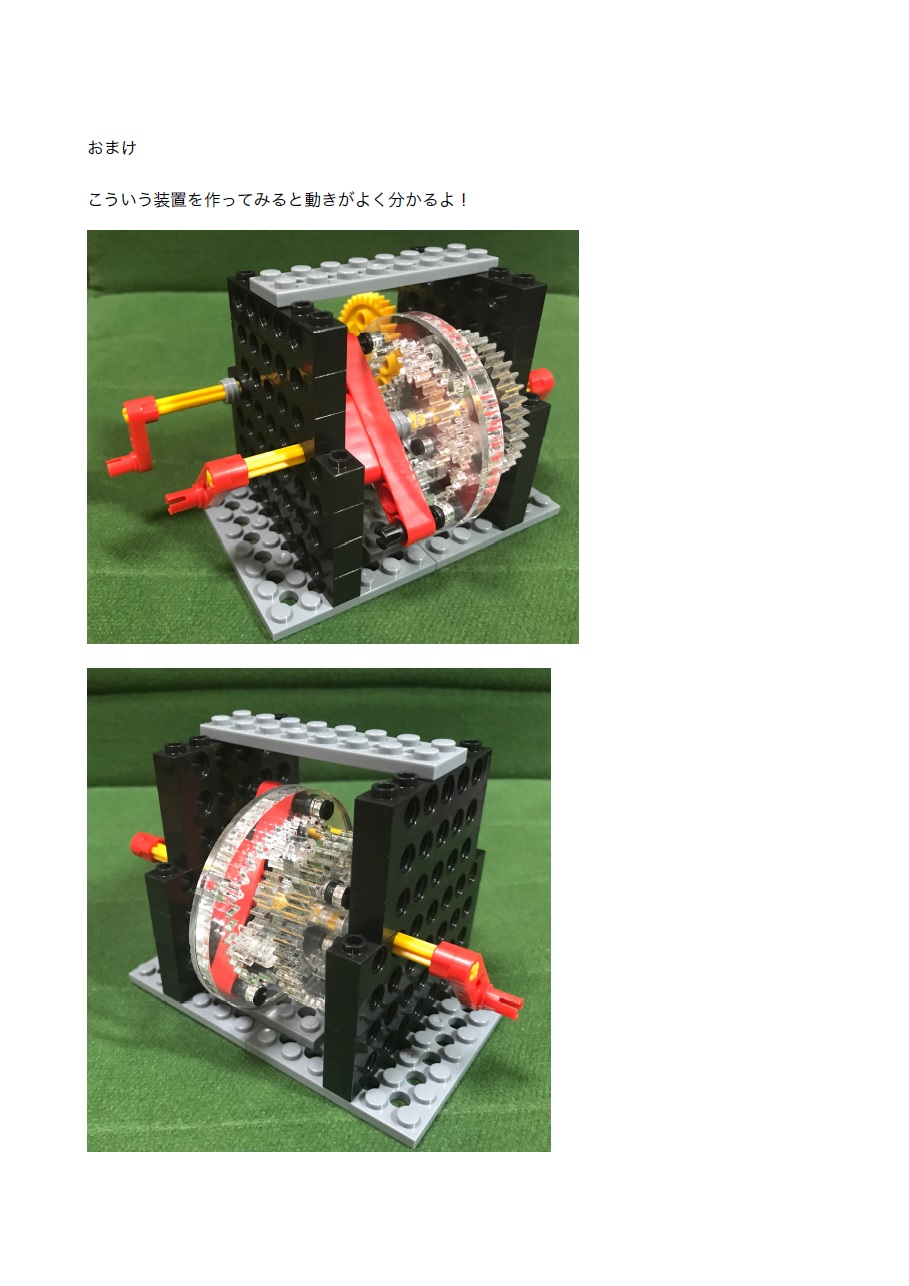
不思議ギア01【遊星歯車】組立手順書








〔設計・製作〕 ロボット教室 × RoBoCoBo
RoBoCoBo(ロボコボ)は、中野と佐藤が立ち上げた実体の無いロボット工房です。
RoBoCoBo 中野・佐藤
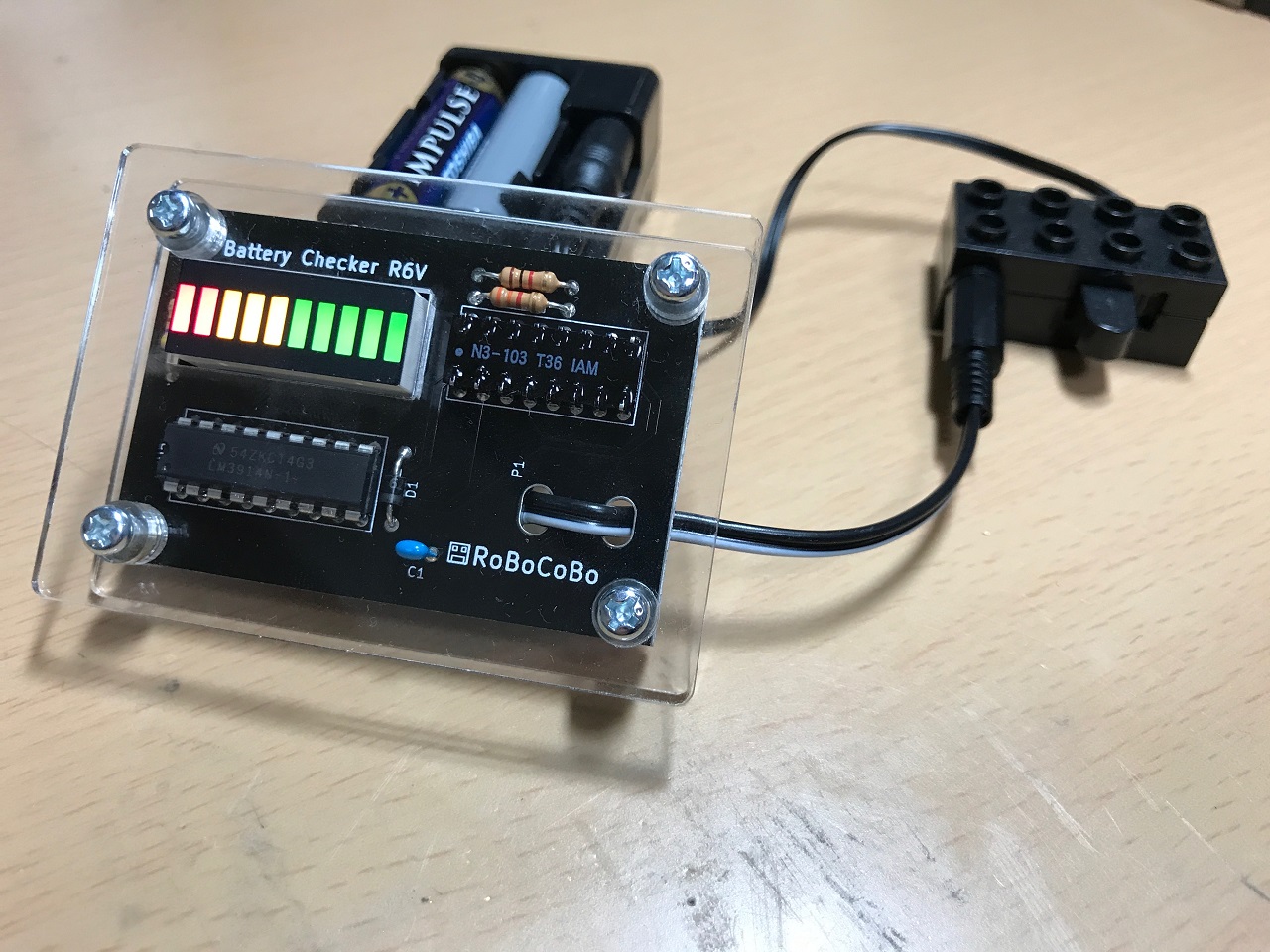
ロボット教室専用 電池チェッカーR6V 取扱説明書
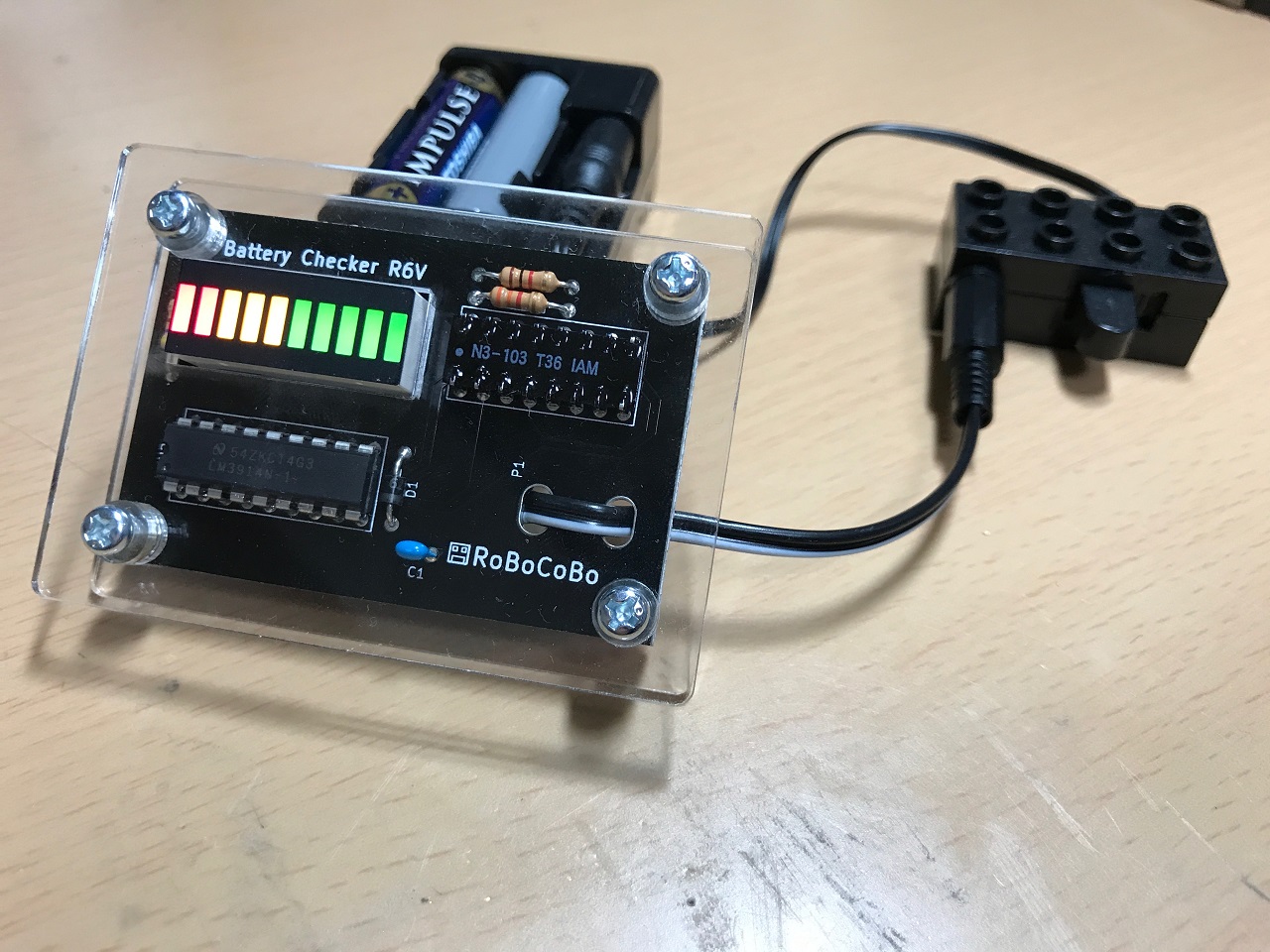
1. 接続方法
1) +-を間違えないよう、電池ボックスに電池4~5本(+ダミー電池)を入れます。
2) 電池チェッカーR6Vのプラグをスライドスイッチのジャックに挿します。
3) スライドスイッチを正方向(左側)に入れます。逆方向(右側)では測れません。
【注意】
・プラグ・ケーブル保護のため、スライドスイッチのプラグを電池ボックスから抜かないで、
電池チェッカR6Vのプラグをスライドスイッチのジャックに挿して使用します。
・新しい電池と古い電池、または、乾電池と充電池を混ぜて入れると、正しいパワーが測れません。
充電池の場合は、すべて同じように充電して使います。
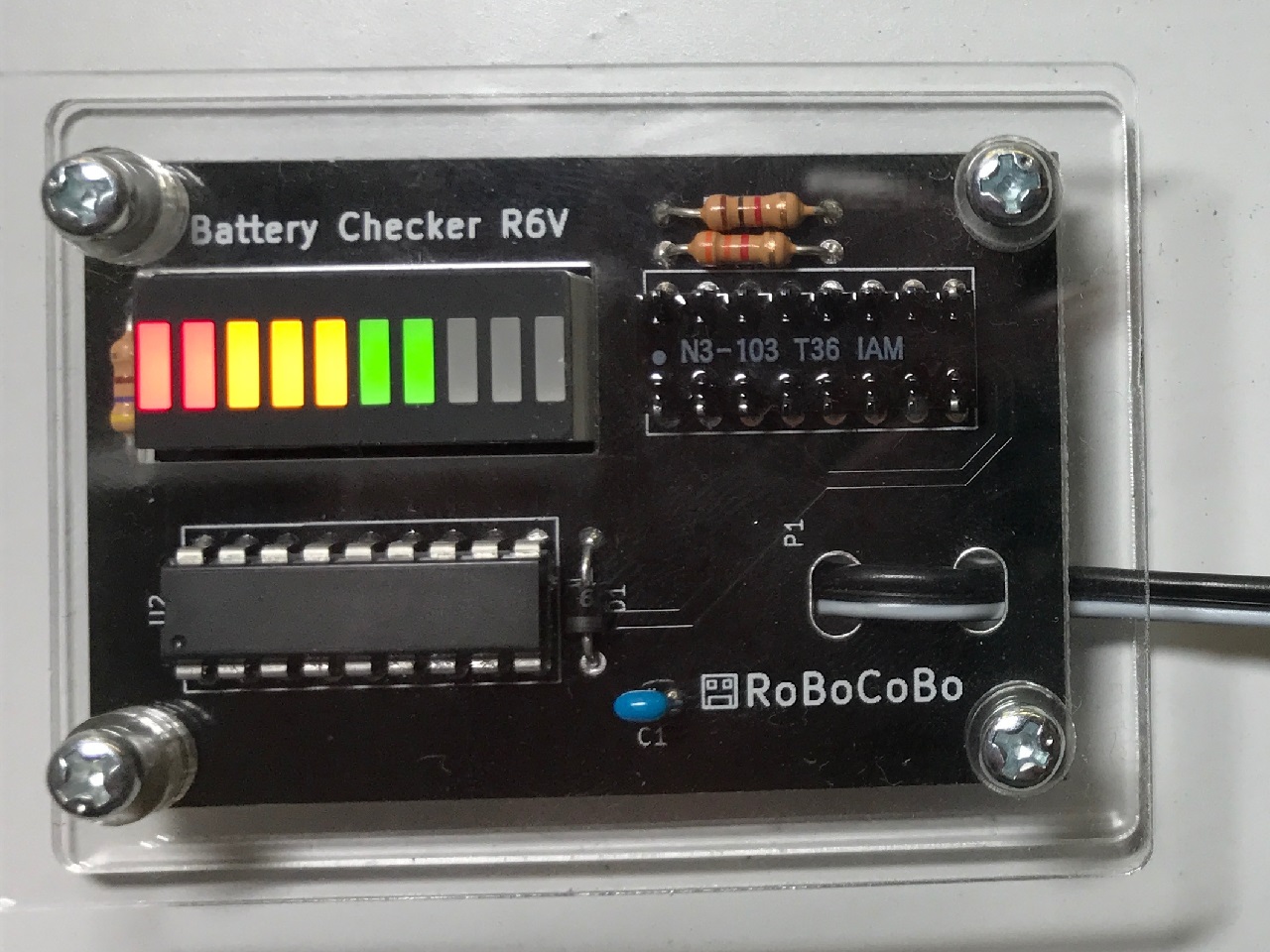
2. 見方

1) 乾電池5本の場合
緑が全点灯(緑5)のときだけ使えます。
緑5でなければ、逆に入れた電池か、充電池か、使えない電池が入っています。
2) 乾電池4本(+ダミー電池1本)の場合
緑のゾーン(緑1~5)で使えます。
緑3~5でないと、パワーが弱くてロボットが動かないことがあります。
3) 充電池5本の場合
2) の場合と同じです。
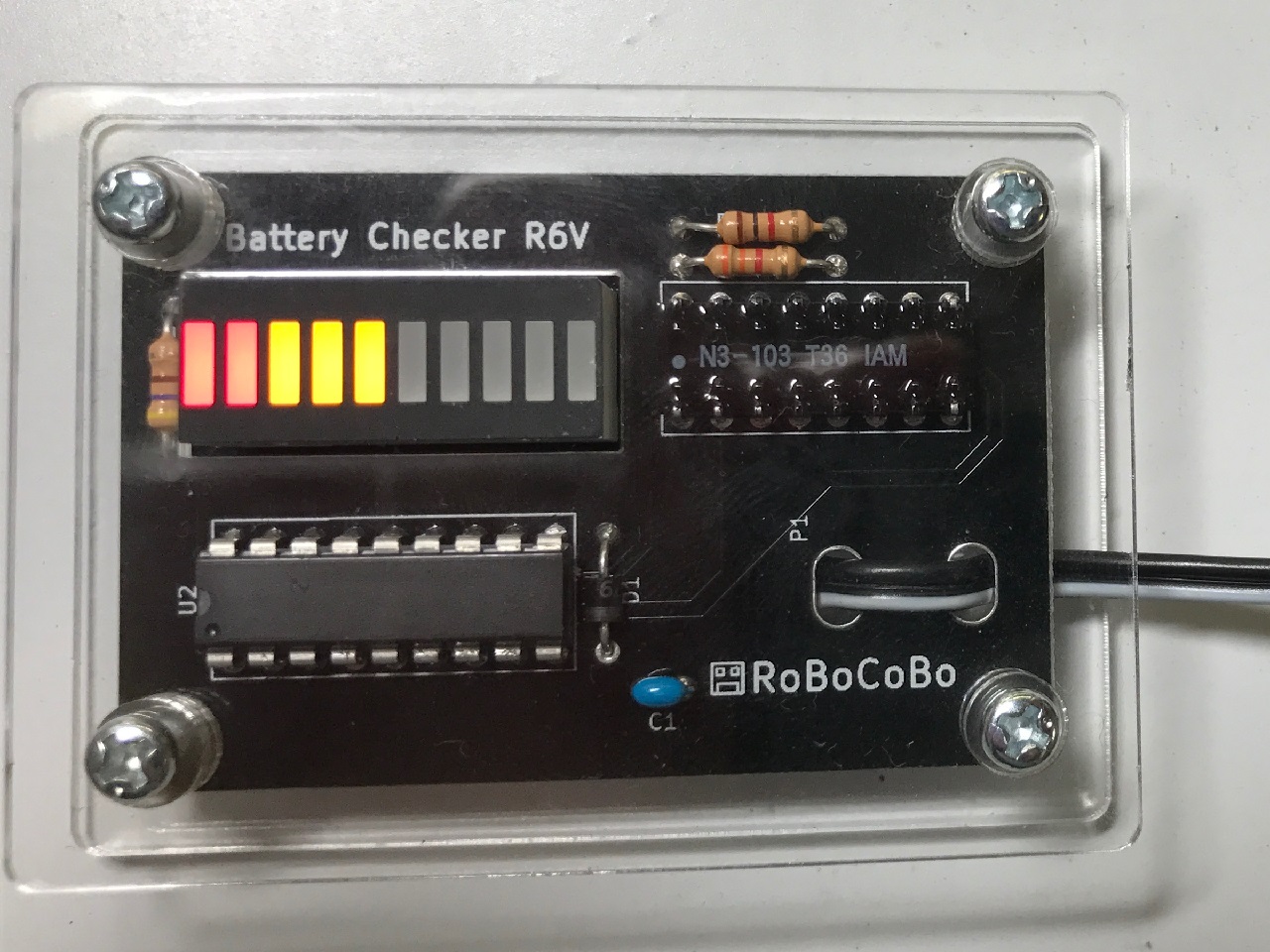
4) 充電池4本(+ダミー電池1本)の場合
黄のゾーン(黄1~3)以上で使えます。
【注意】
電池を交換・充電したばかりなのにパワーが低い場合は、+-を逆に入れた電池がないか確認します。
3. 仕様
・市販の電池チェッカーと異なり、電圧テスター型です。
緑5(6.0V)~赤1(4.2V)まで、0.2V刻みでLEDが点灯します。
・負荷電流はLED点灯分のみですので、あまり電池を消費しない代わりに、
モーター駆動パワーを正しく表示できない場合がありますので、目安にしてください。
〔設計・製作〕 ロボット教室 × RoBoCoBo
RoBoCoBo(ロボコボ)は、中野と佐藤が立ち上げた実体の無いロボット工房です。
RoBoCoBo 中野・佐藤
ロボット教室専用 電池チェッカーR6V 組立手順書
1. 必要な工具と作業
・はんだ、はんだごて
・+ドライバー
・ニッパ
・ペンチ
【注意】
・本品の製作には、はんだ付け作業が必要です。
保護者の方と一緒に製作に当たってください。
・IC, LED, ダイオードの極性(向き)を間違えないよう、注意して取付けます。
間違えると、動作しないばかりか、発熱・故障の原因となります。
原因不明の場合は、電源プラグを抜き、中野・佐藤まで持参ください。
2. 部品リスト
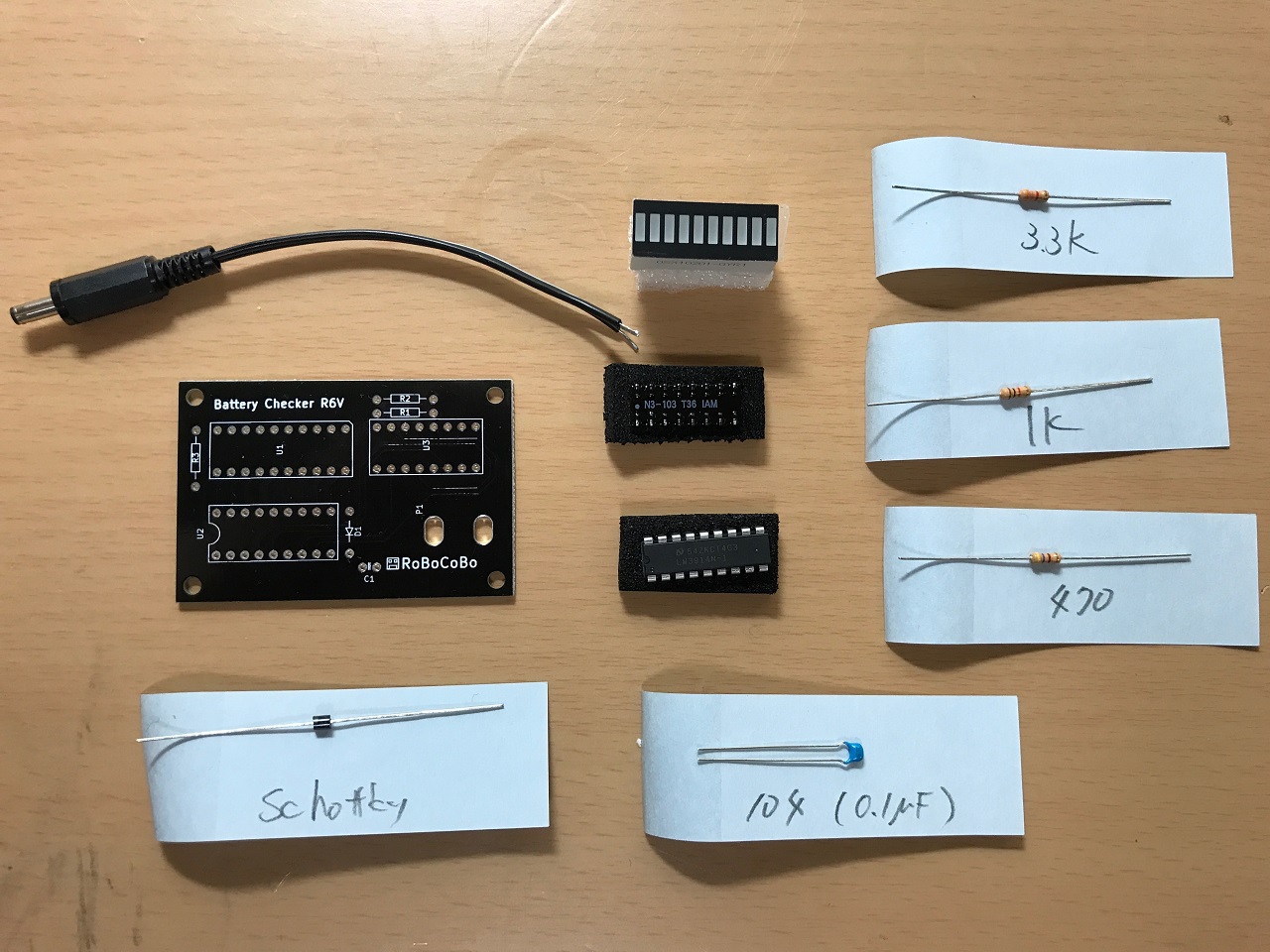
・回路基板 [Battery Checker R6V] + プラグコード
・制御IC [LM3914N]
・10バーLED [OSX10201-GYR1]
・10kΩ抵抗アレイ [N3-103]
・抵抗x3 (3.3k, 1K, 470Ω)
・コンデンサ 104(0.1μF)
・ダイオードx1
・アクリル天板
・アクリル裏板
・ネジx4
・ワッシャーx12
3. 製作
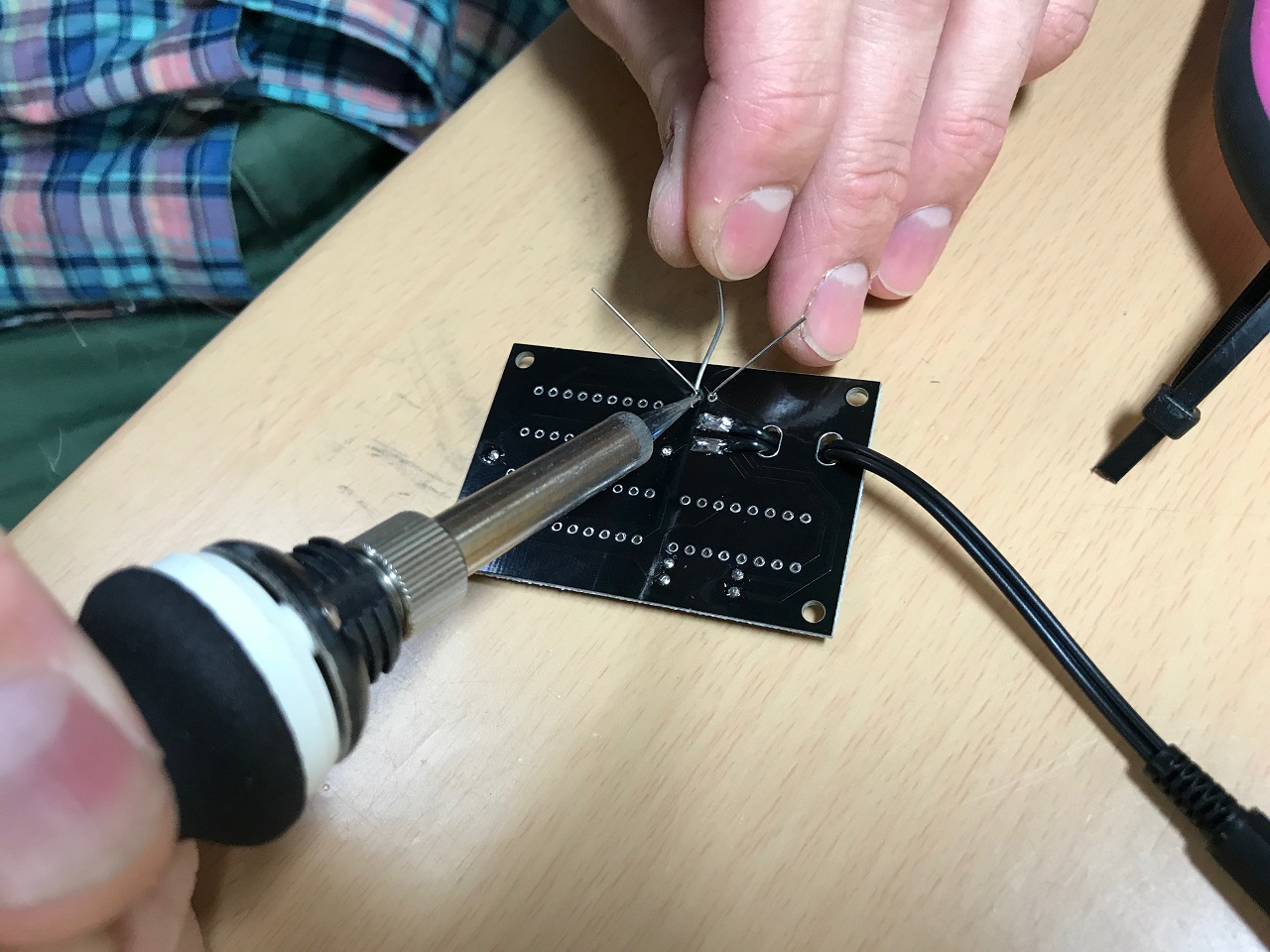
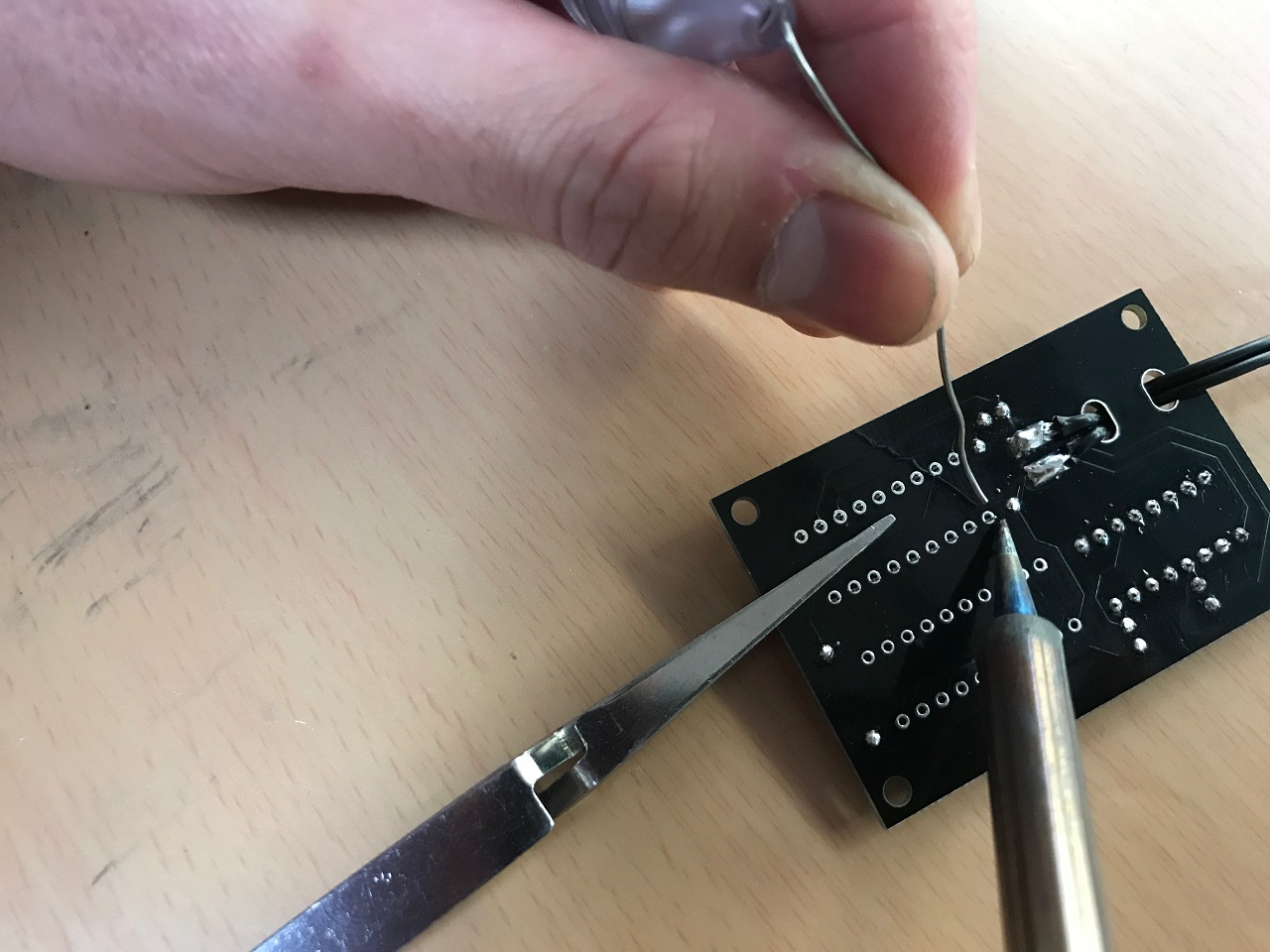
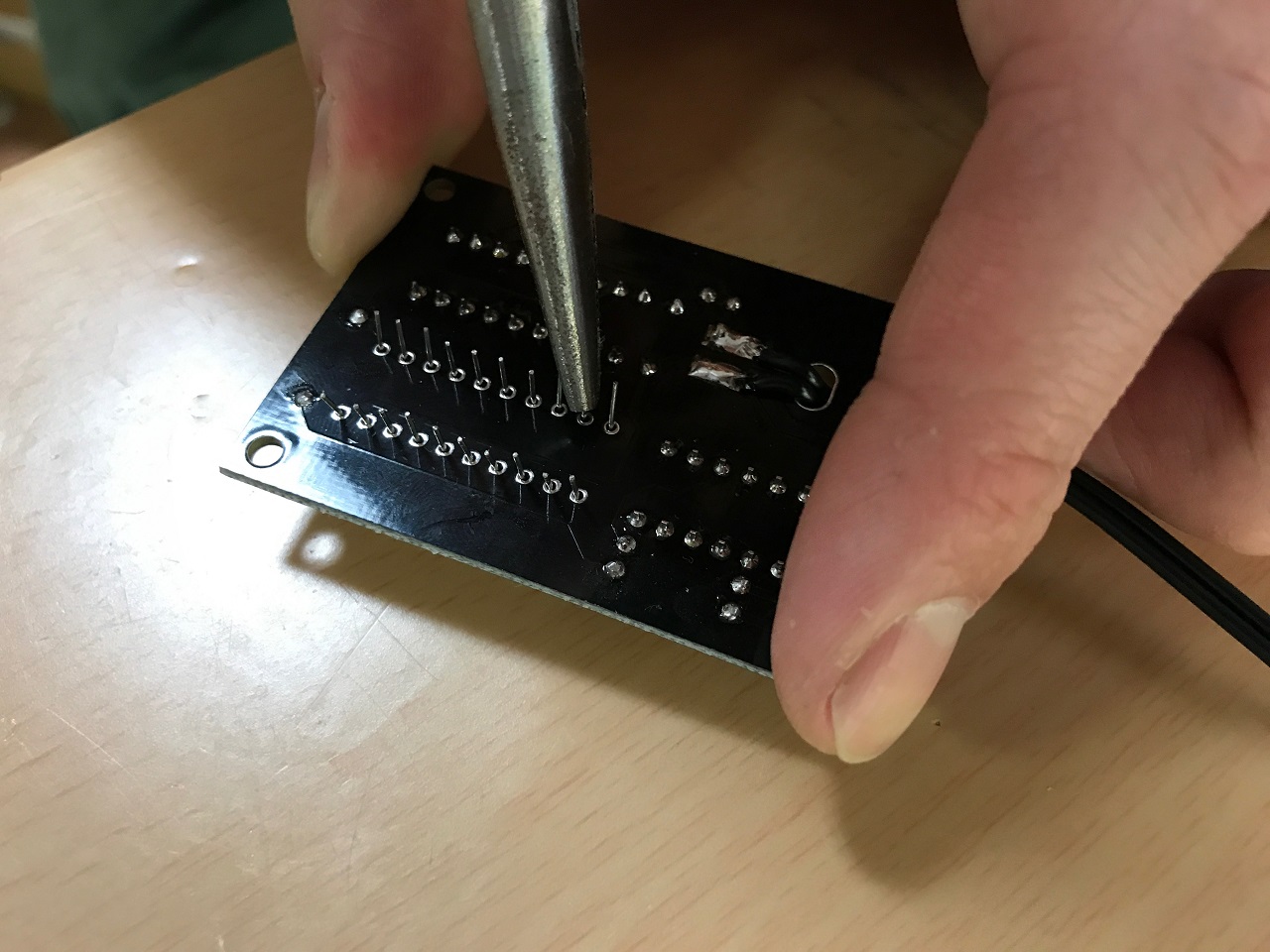
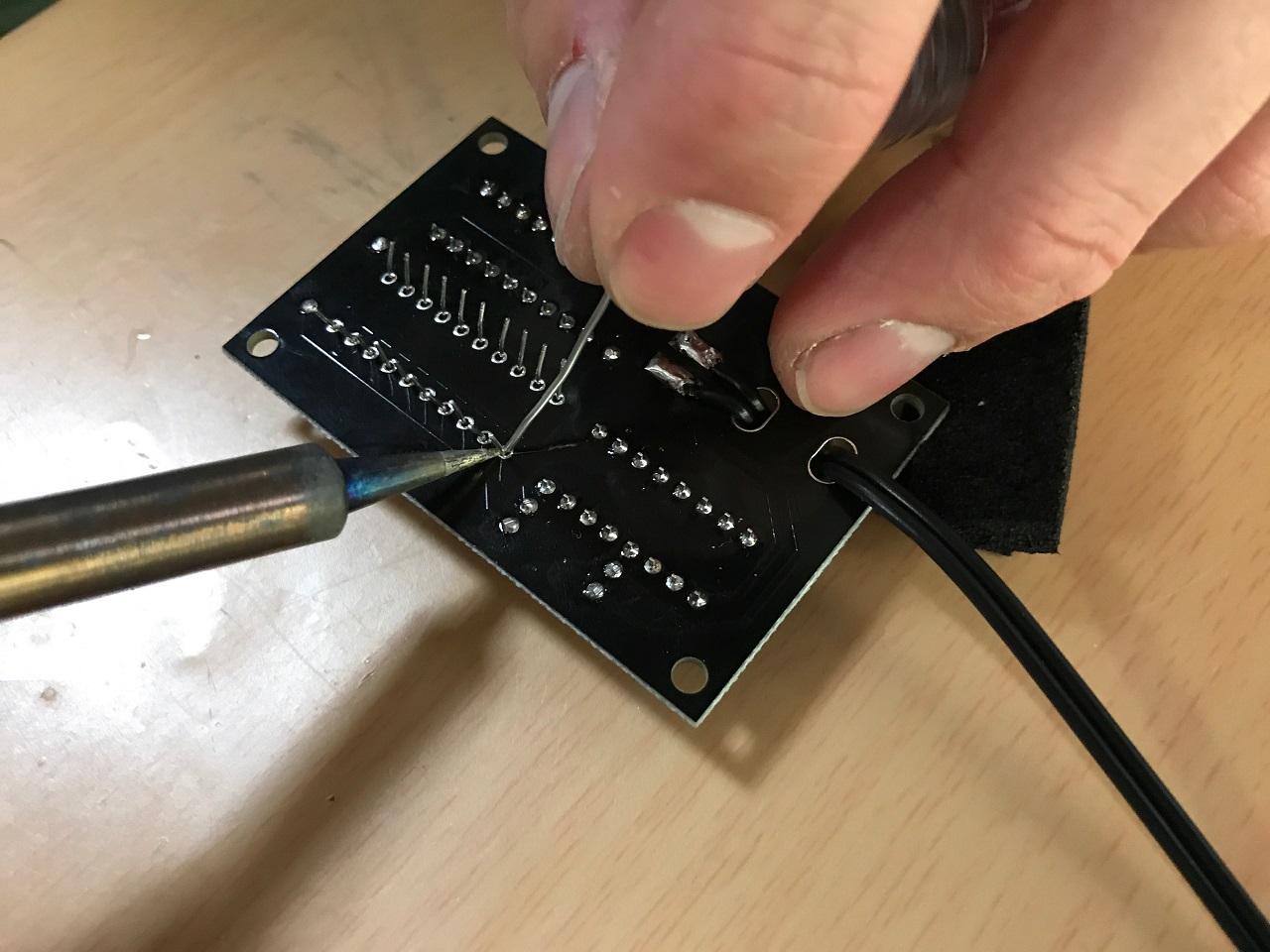
1) ダイオード取付け

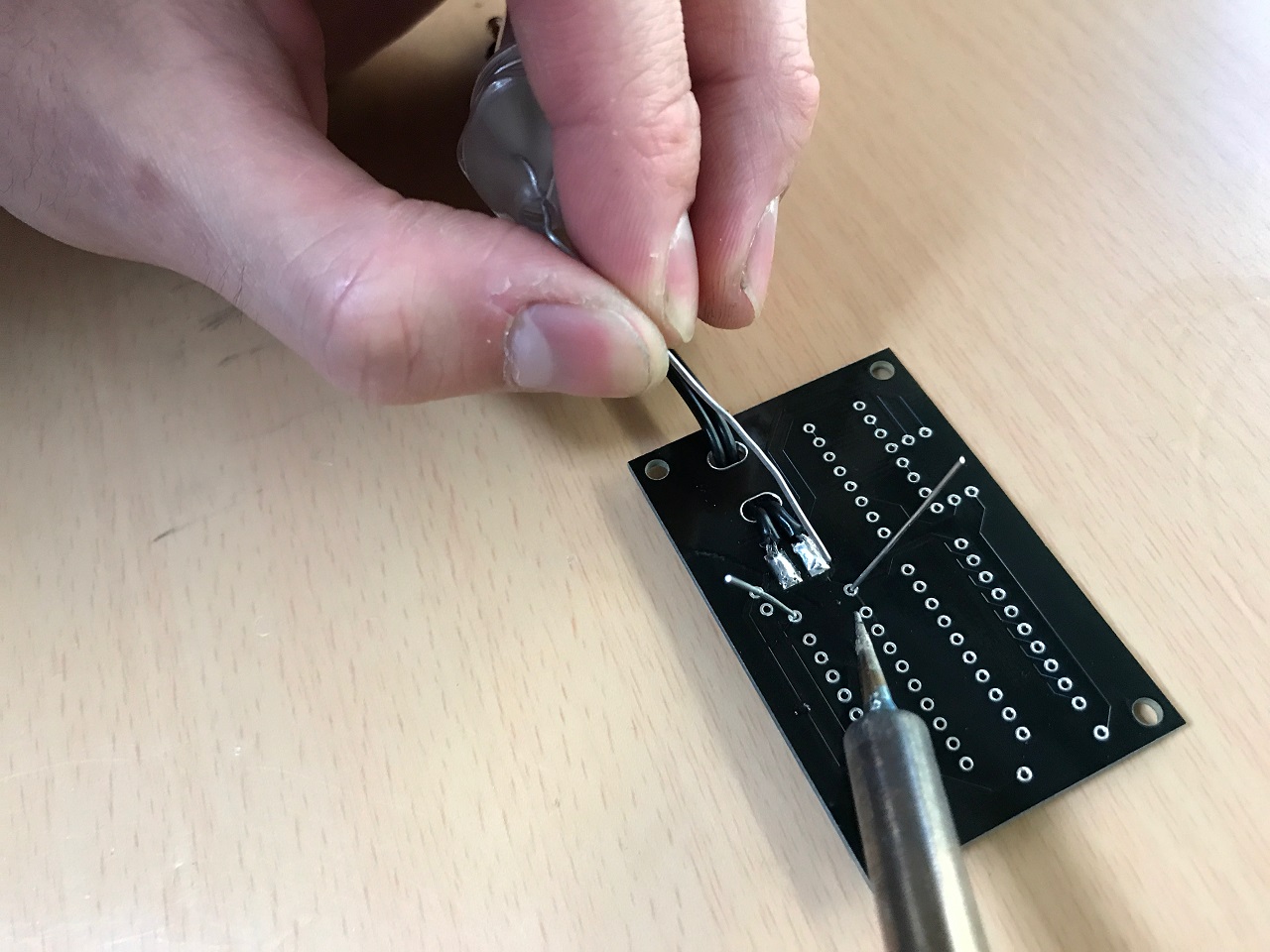
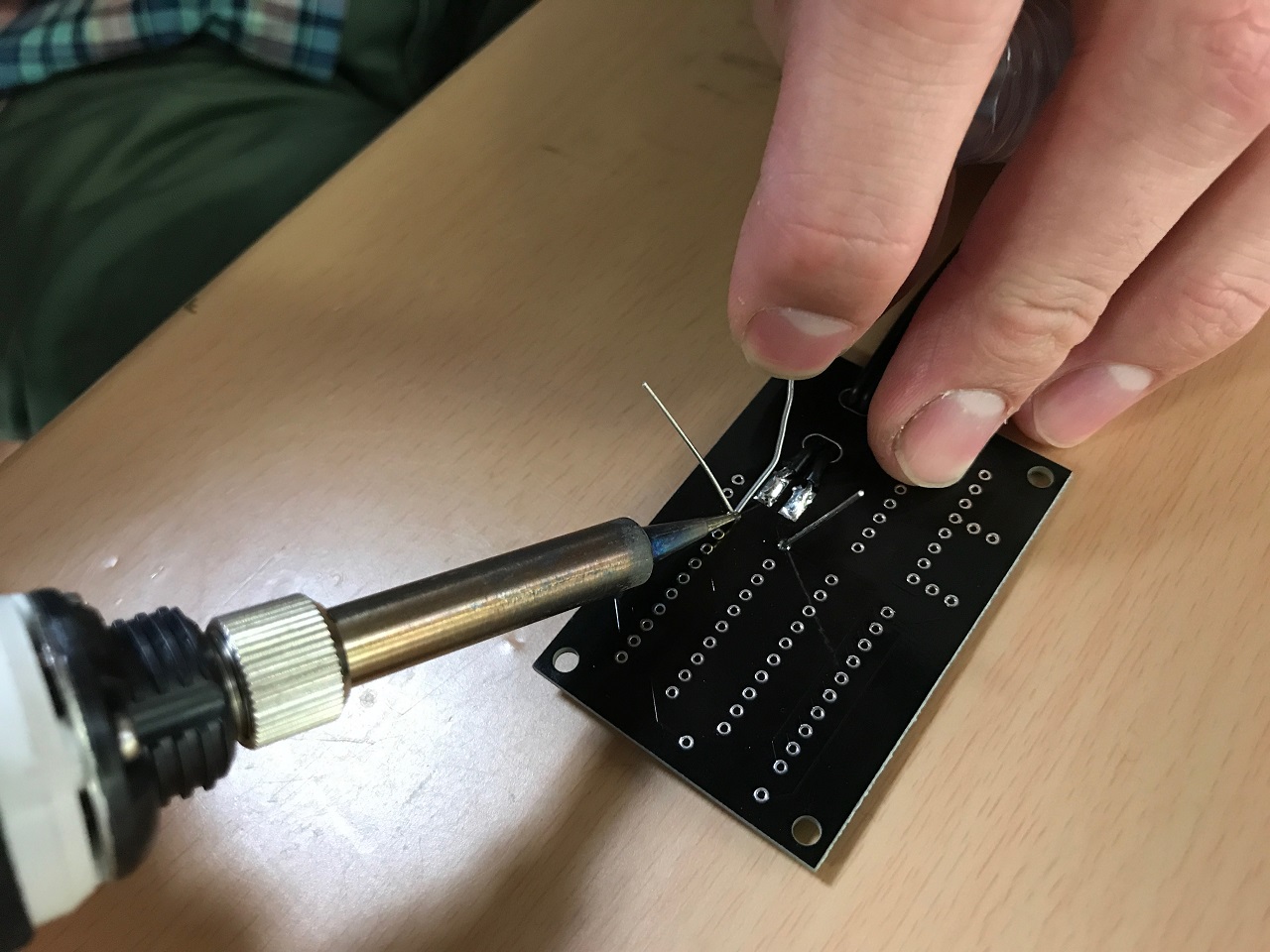
- リード(足)を曲げ、基板の穴 D1 に挿します。
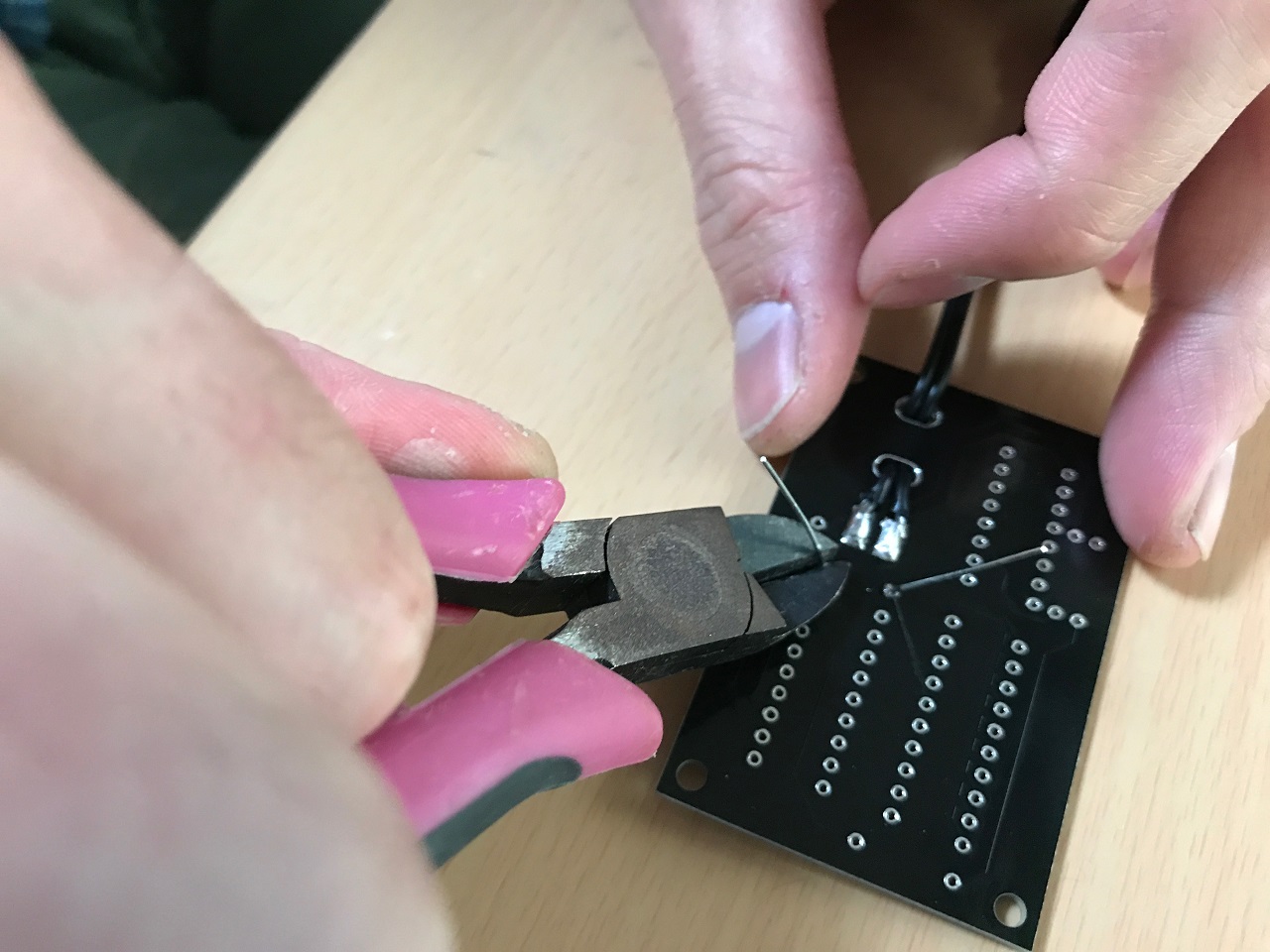
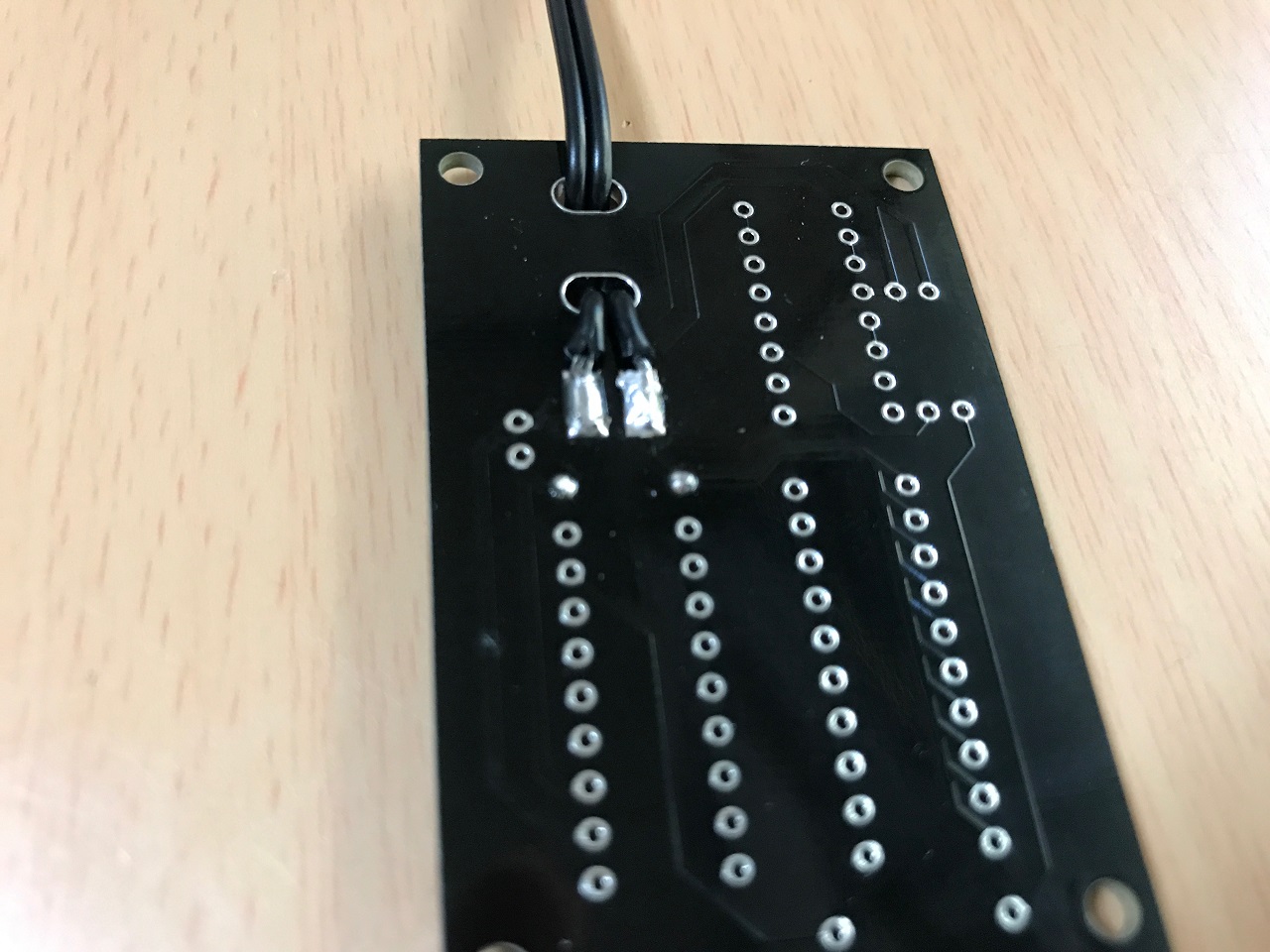
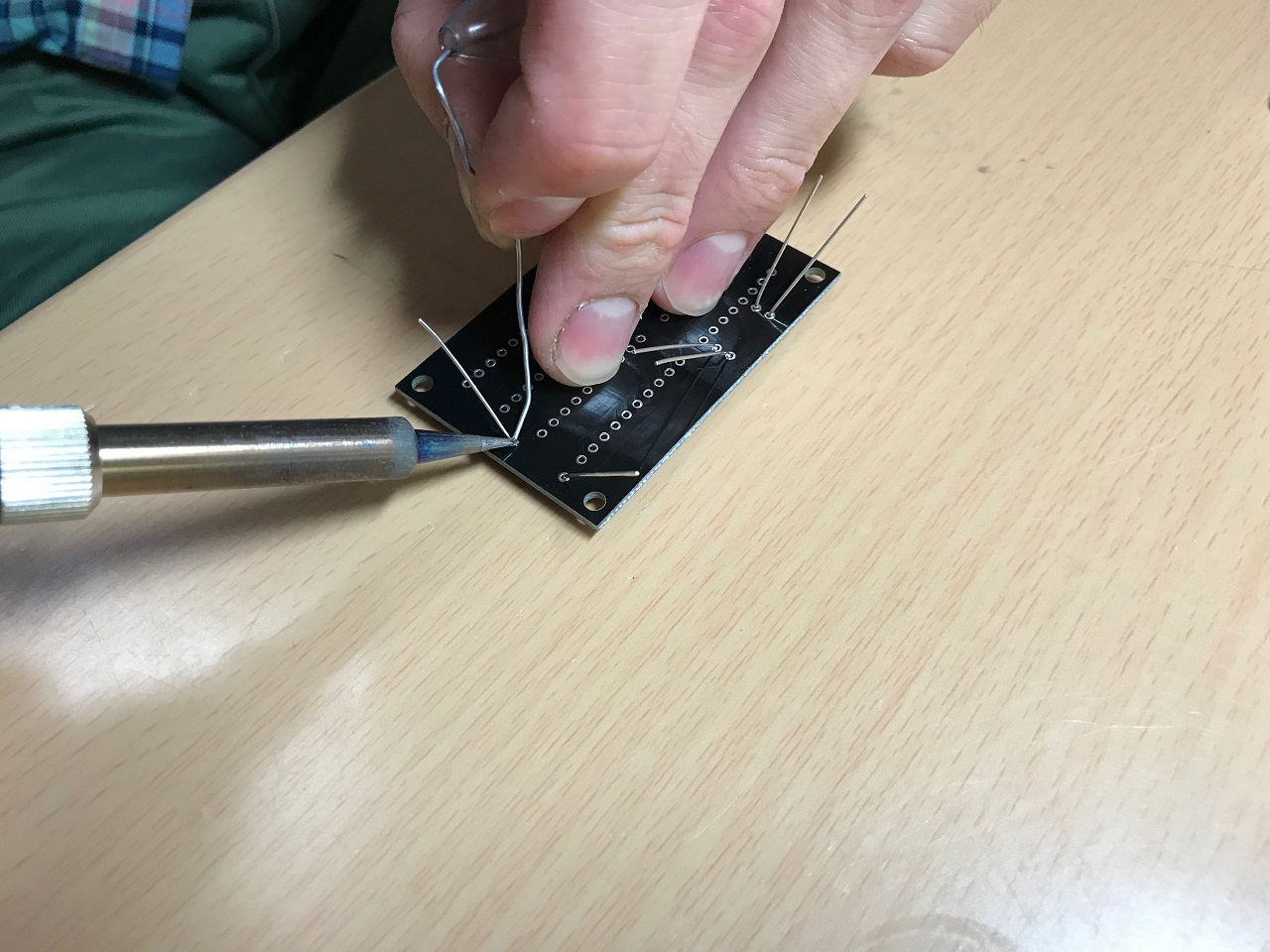
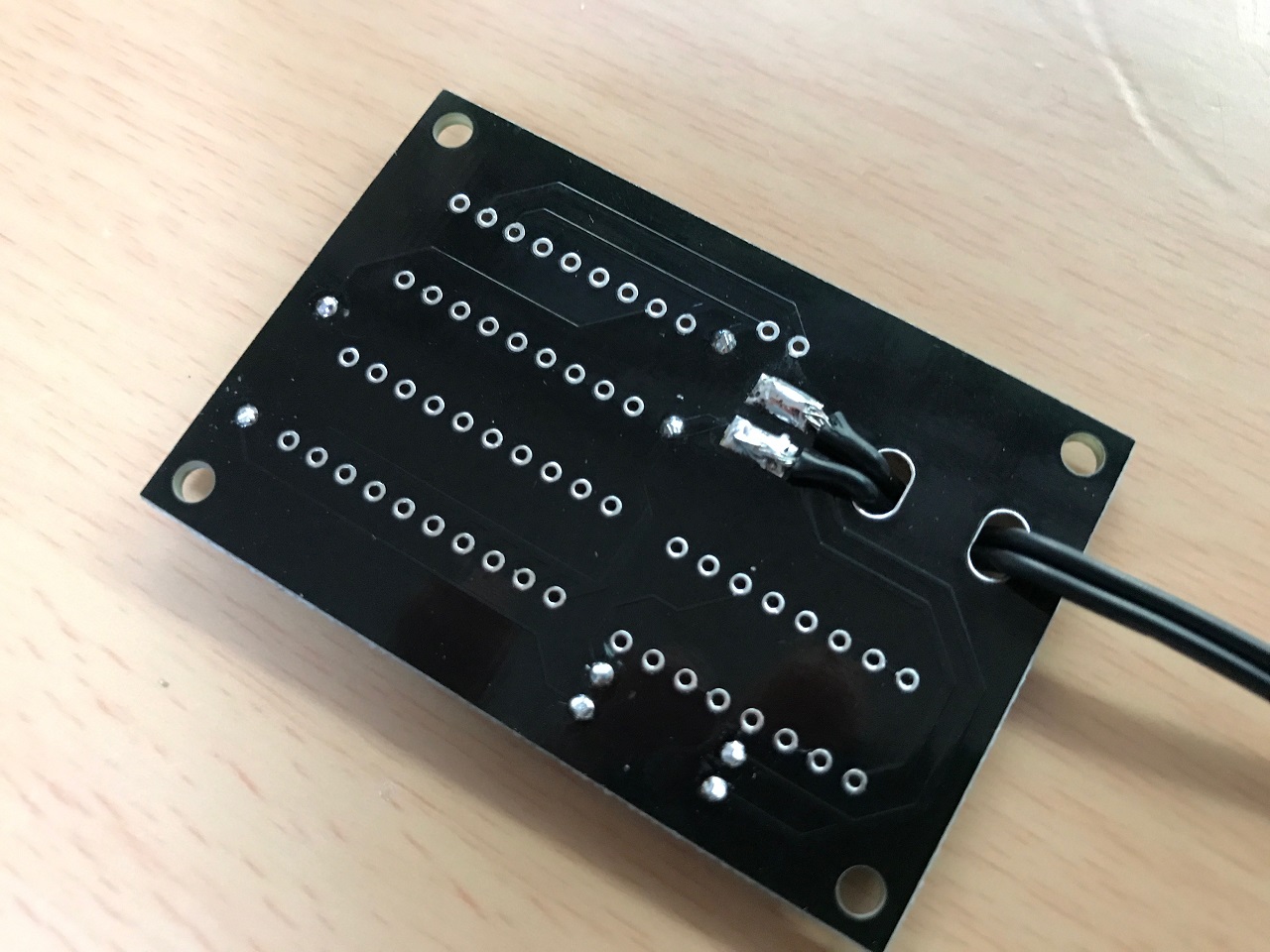
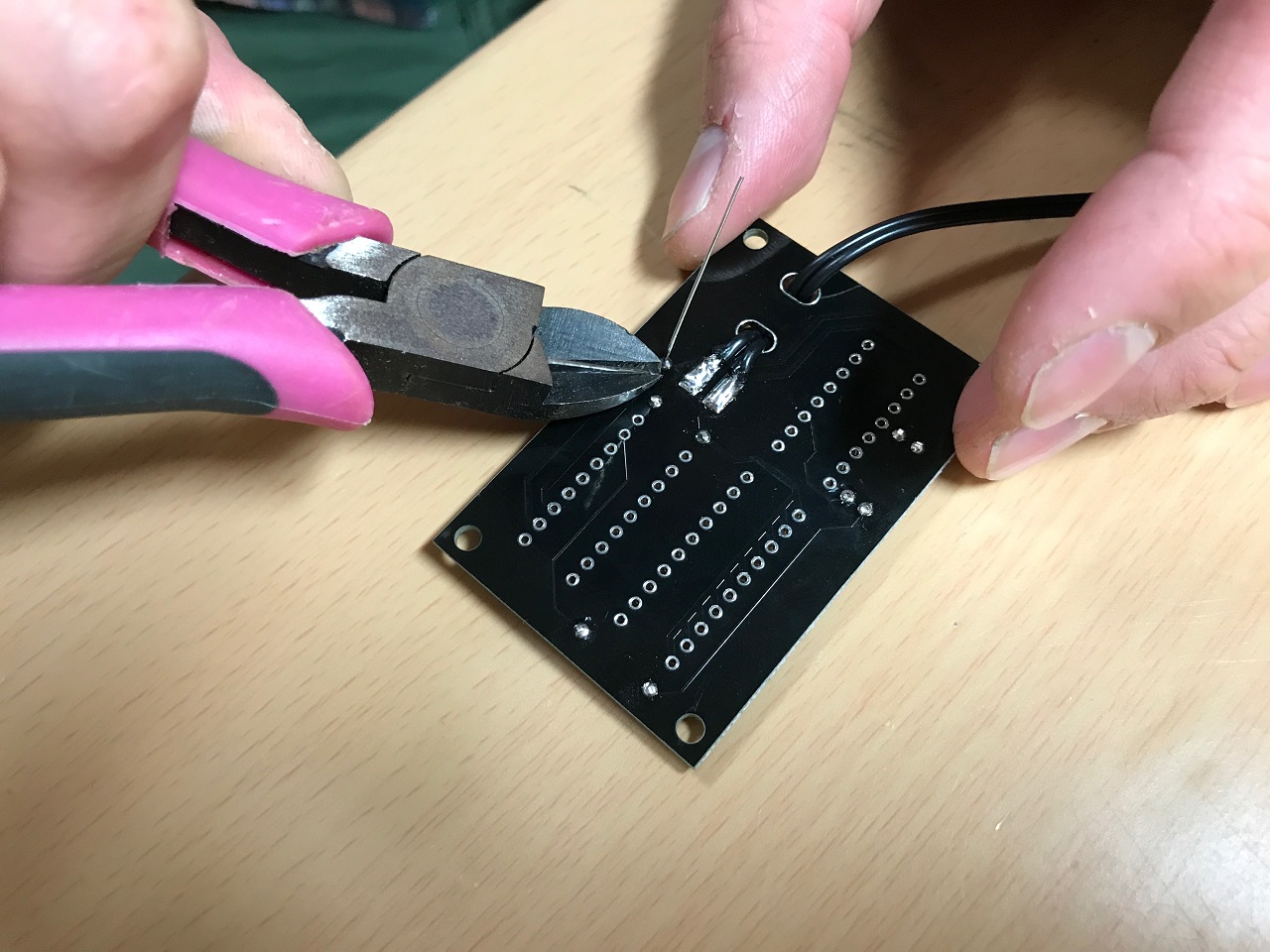
- 裏面でリードをハの字に開き、はんだ付けしてから、余分なリードをニッパで切ります。
【注意】
ダイオードの向きに注意します。白い帯のある側(カソード)を下向きにします。
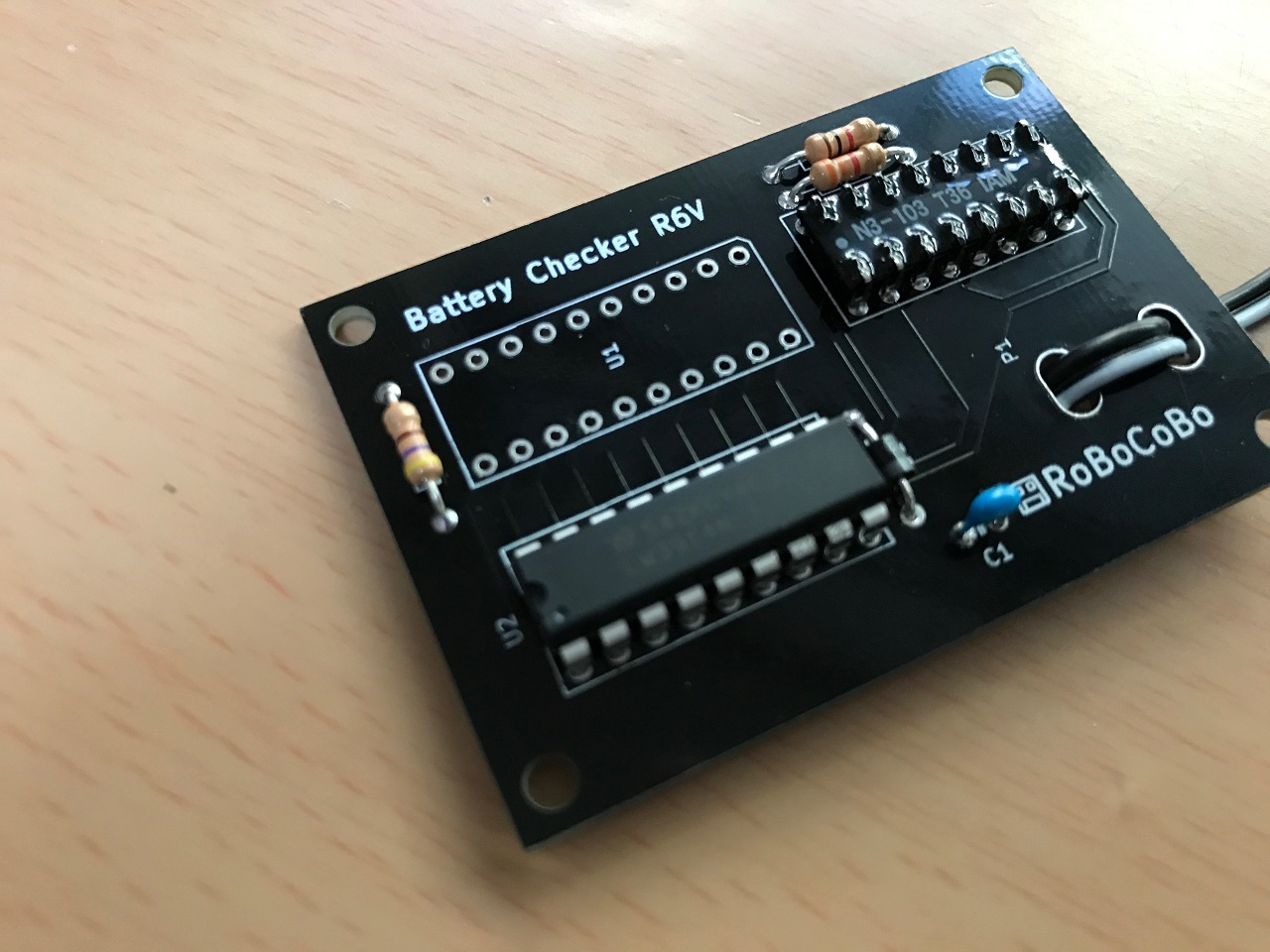
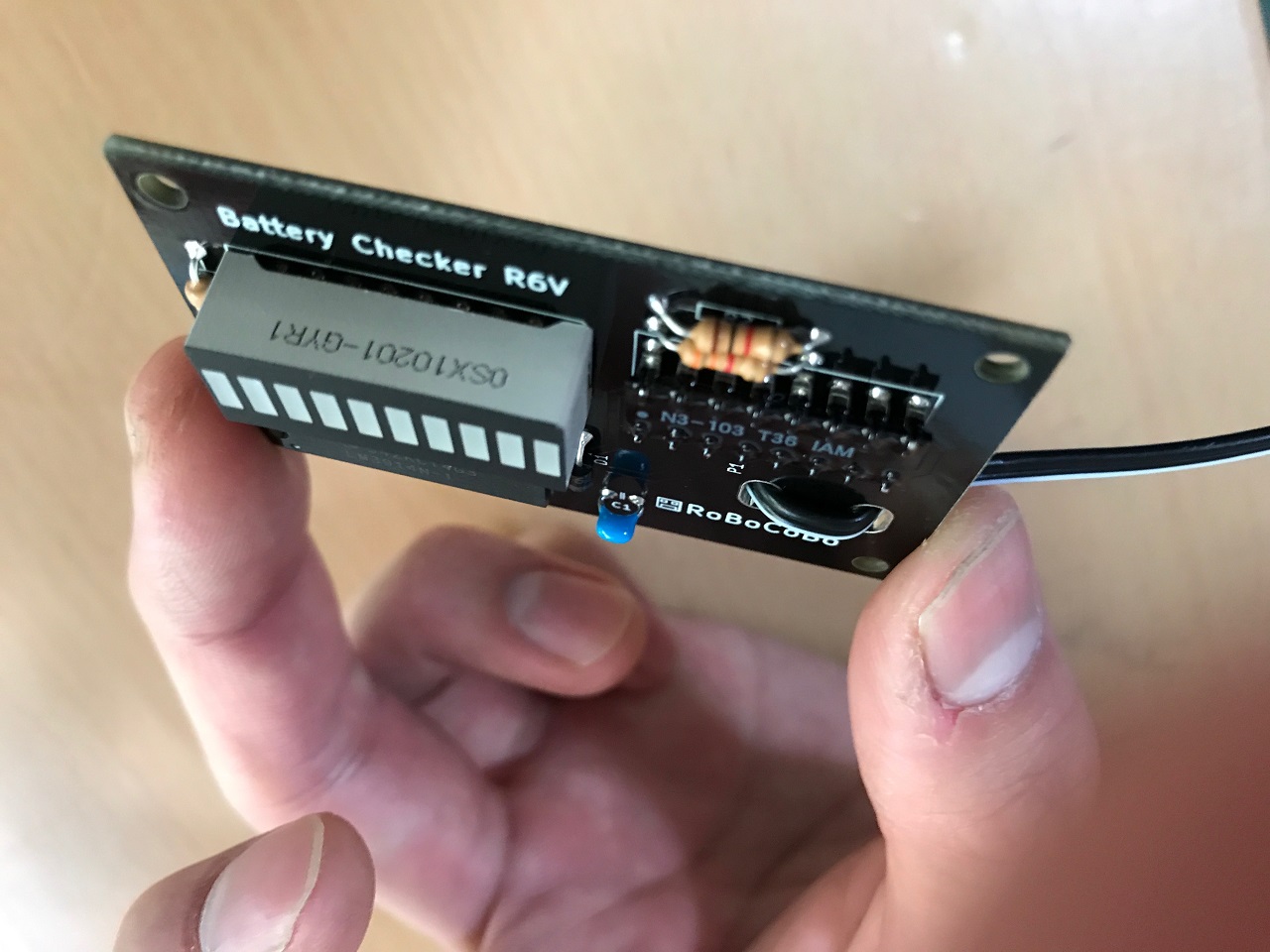
2) 抵抗x3(3.3k, 1K, 470Ω)取り付け
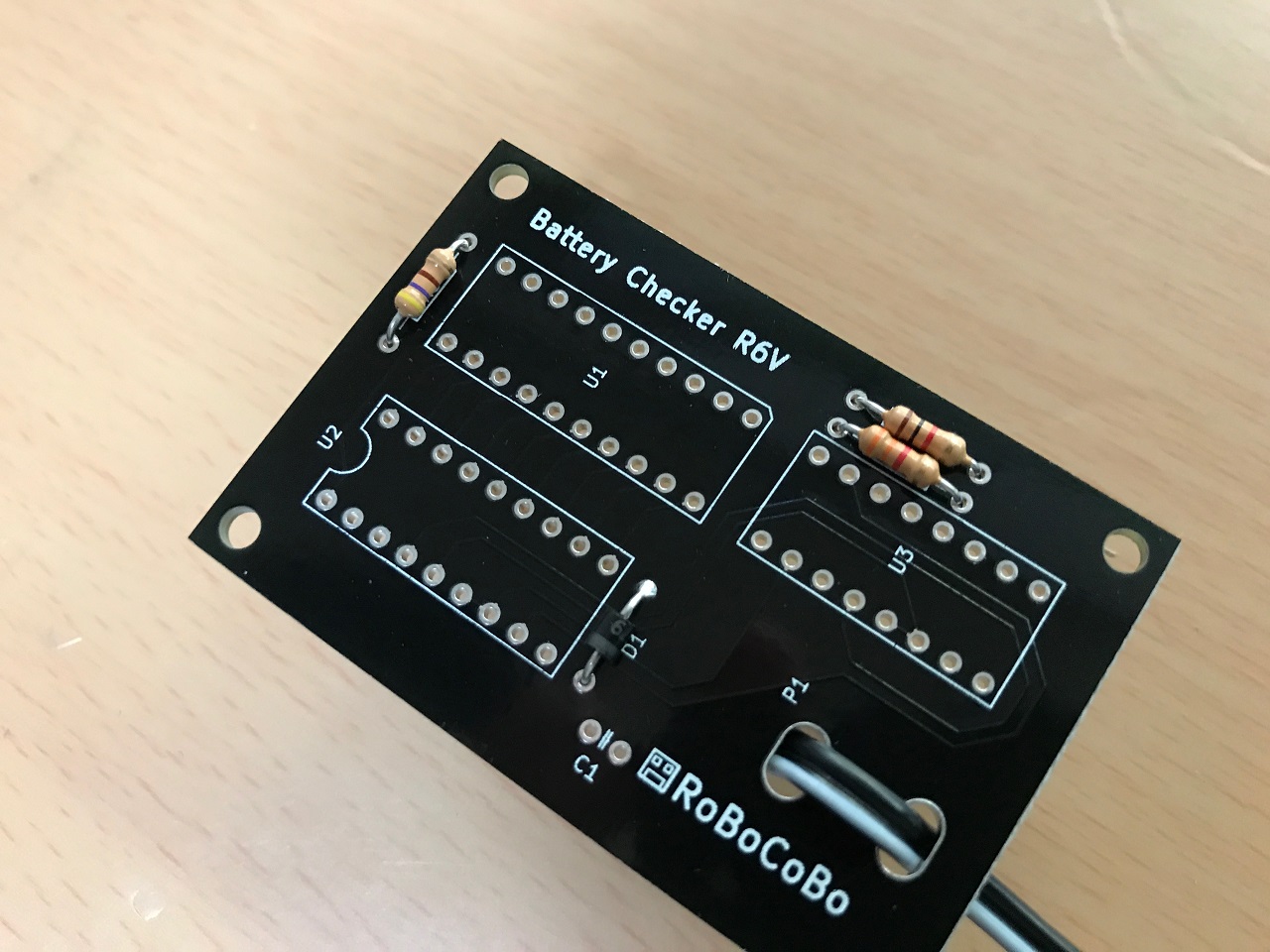
- 写真をよく見て、抵抗3種を正しい穴 R1, R2, R3 に挿します。
・R1 … 3.3kΩ(端にオレンジ色の帯)
・R2 … 1kΩ(端に茶色の帯)
・R3 … 470Ω(端に黄色の帯)
- 裏面でリードをハの字に開き、はんだ付けしてから、余分なリードをニッパで切ります。
【注意】
抵抗に向きはありませんが、場所を間違えないよう注意します。
3) コンデンサ取付け
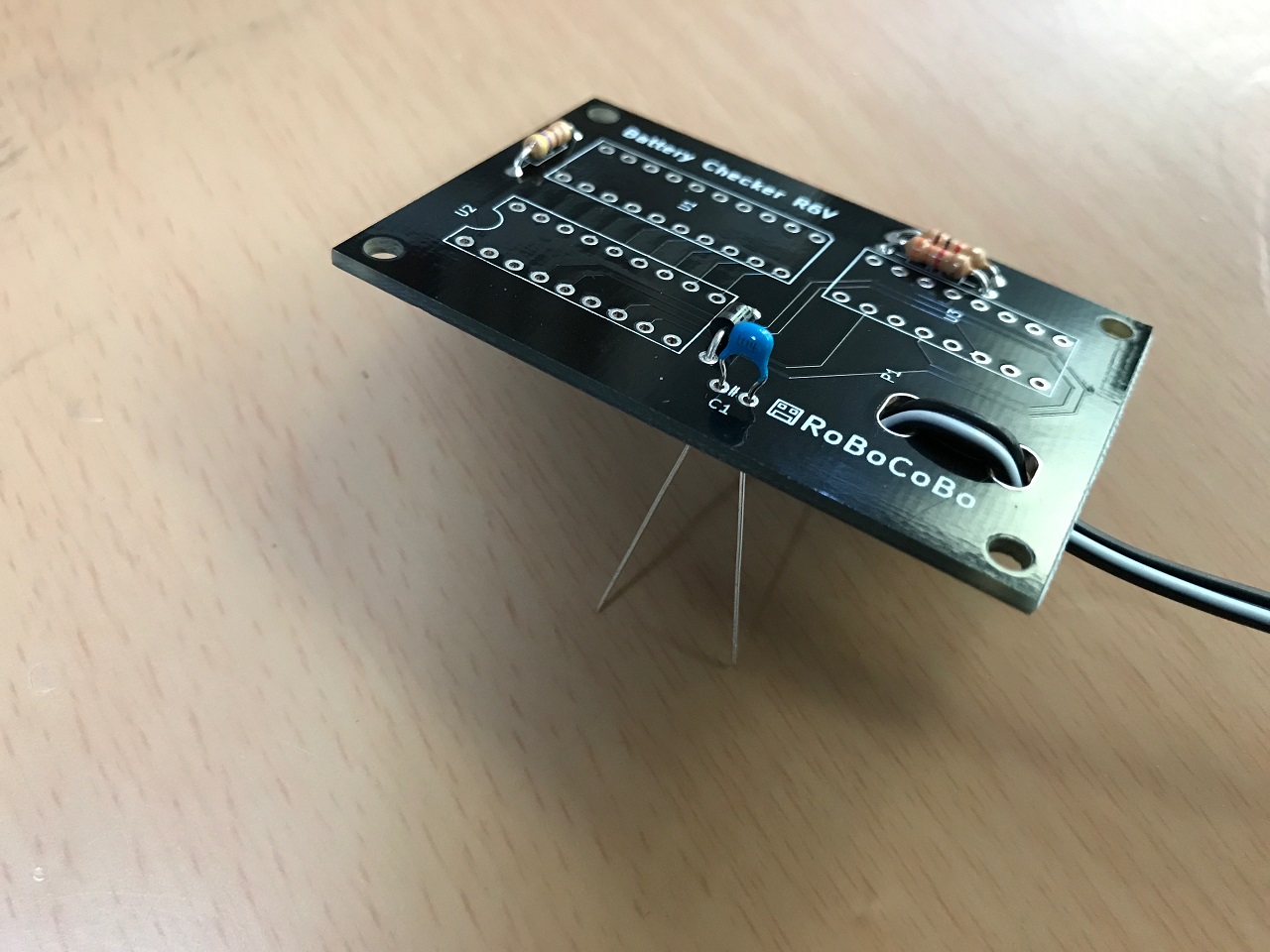
- リード(足)を曲げ、基板の穴 C1 に挿します。
- 裏面でリードをハの字に開き、はんだ付けしてから、余分なリードをニッパで切ります。
【注意】
このコンデンサに向きはありません。
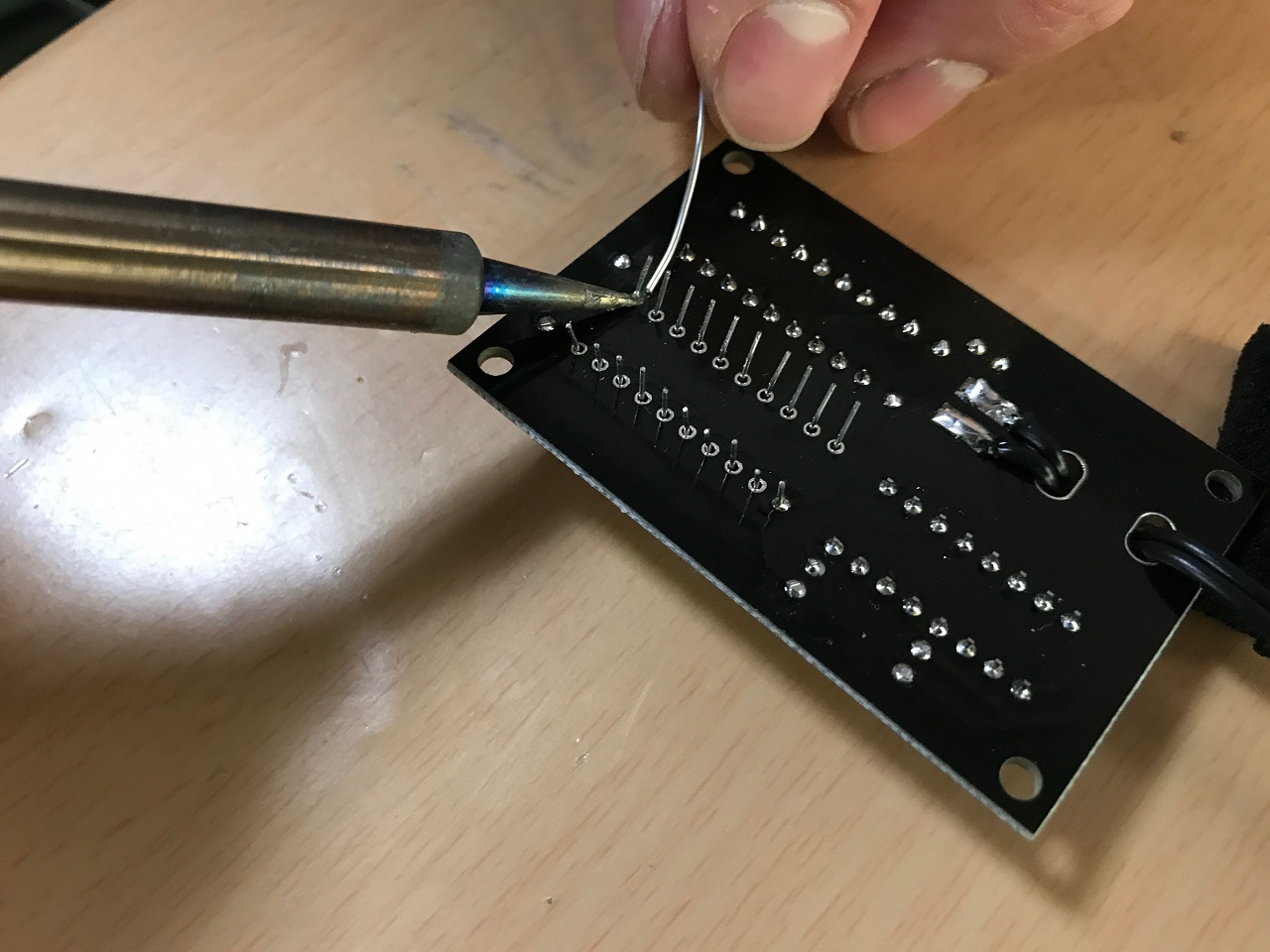
4) 抵抗アレイ取付け
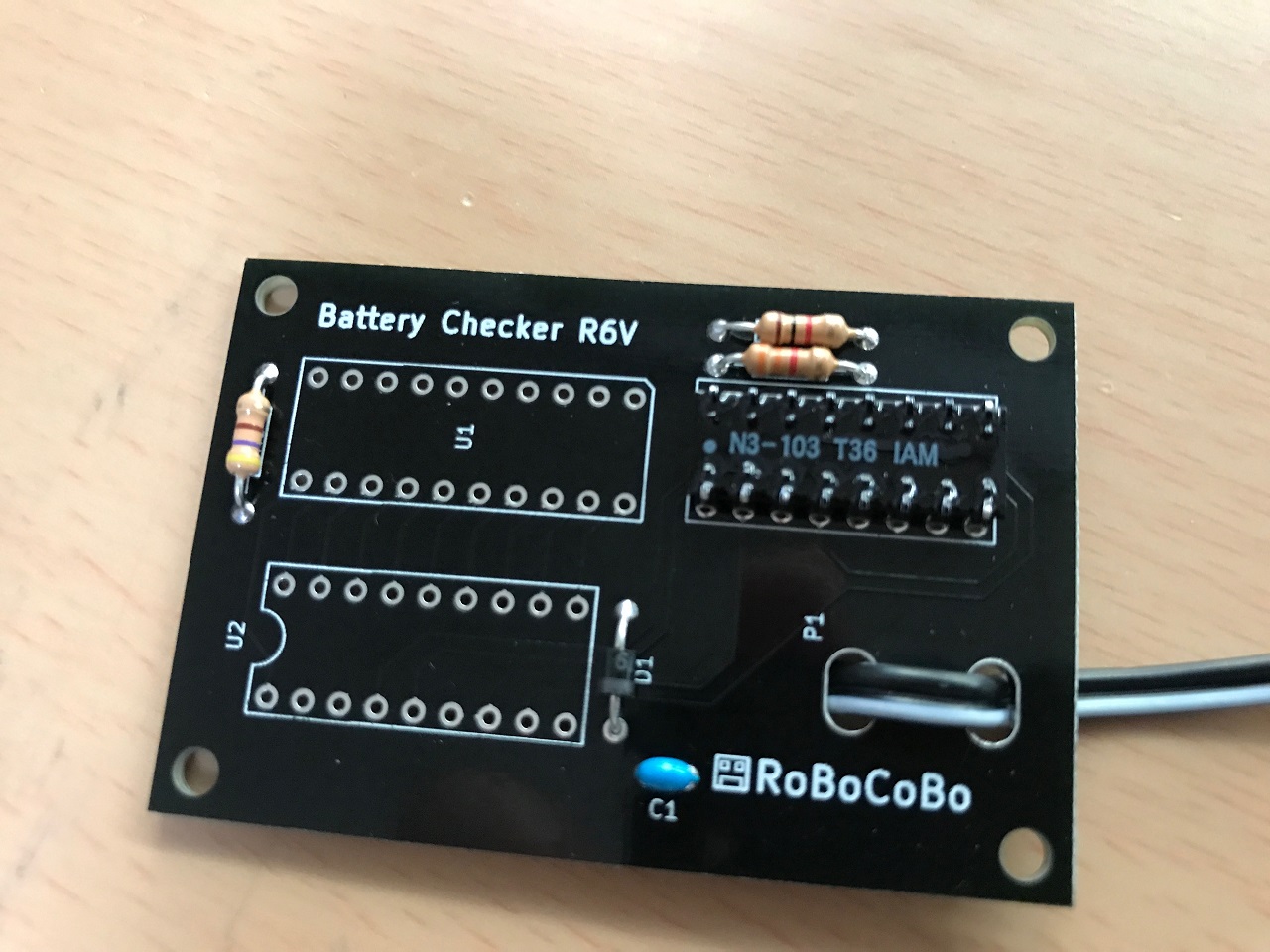

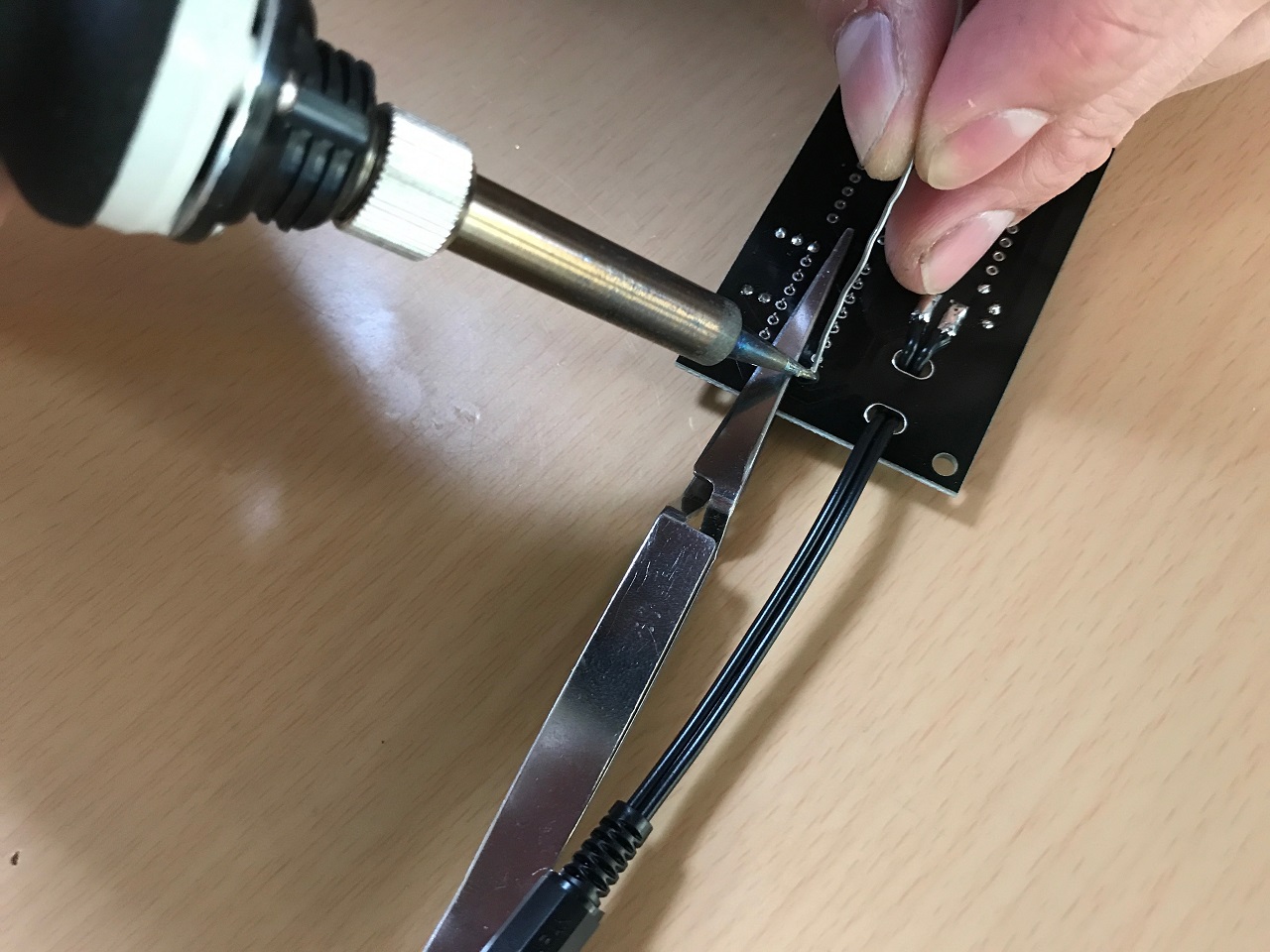
- 基板の穴 U3 に挿します。
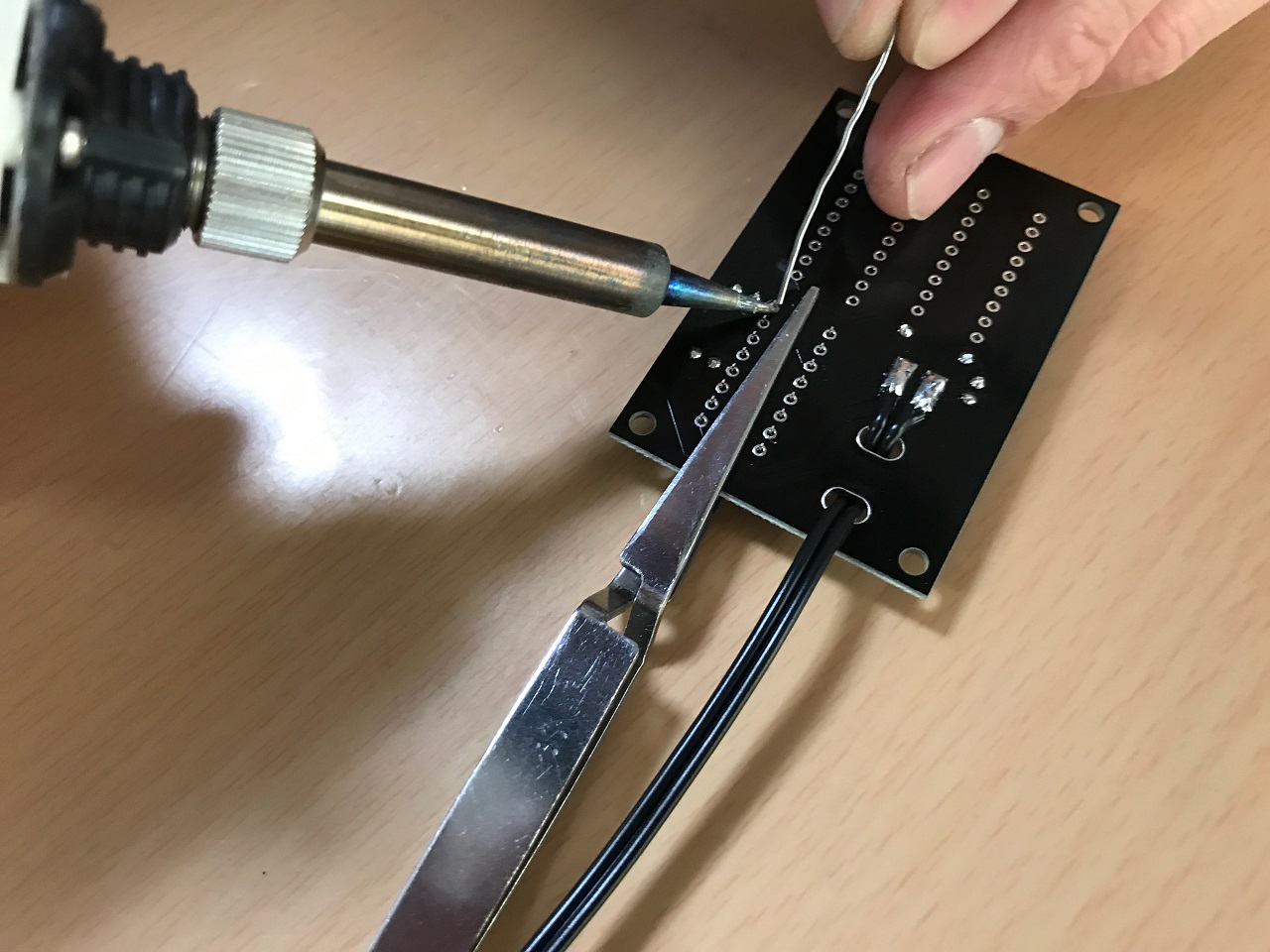
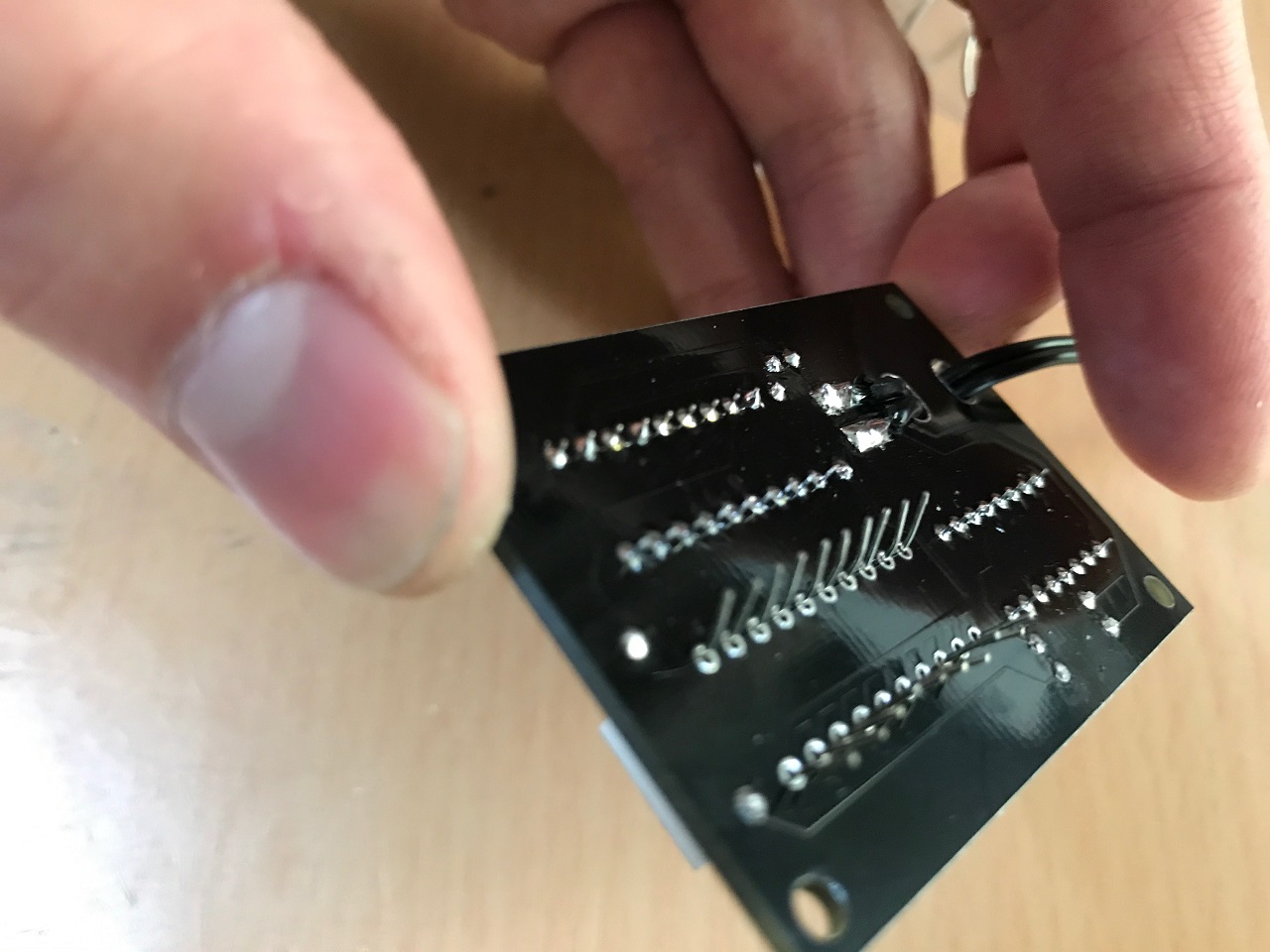
- ペンチ等で固定し、裏面をはんだ付けします。
先に対角の2ピンをはんだ付け後、ペンチを外し、残りのピンをはんだ付けします。
【注意】
抵抗アレイに向きはありませんが、印字の向きで決めます。
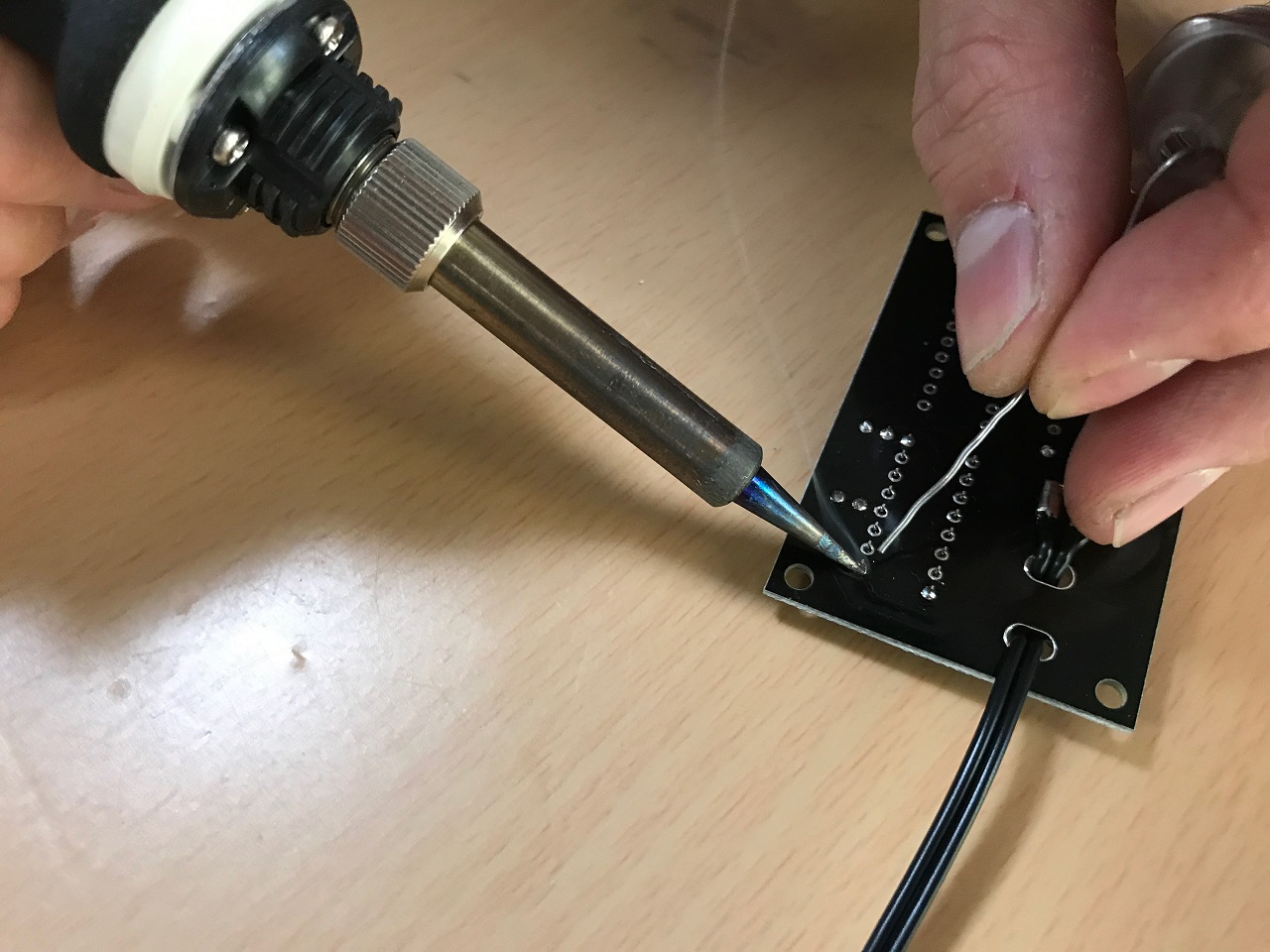
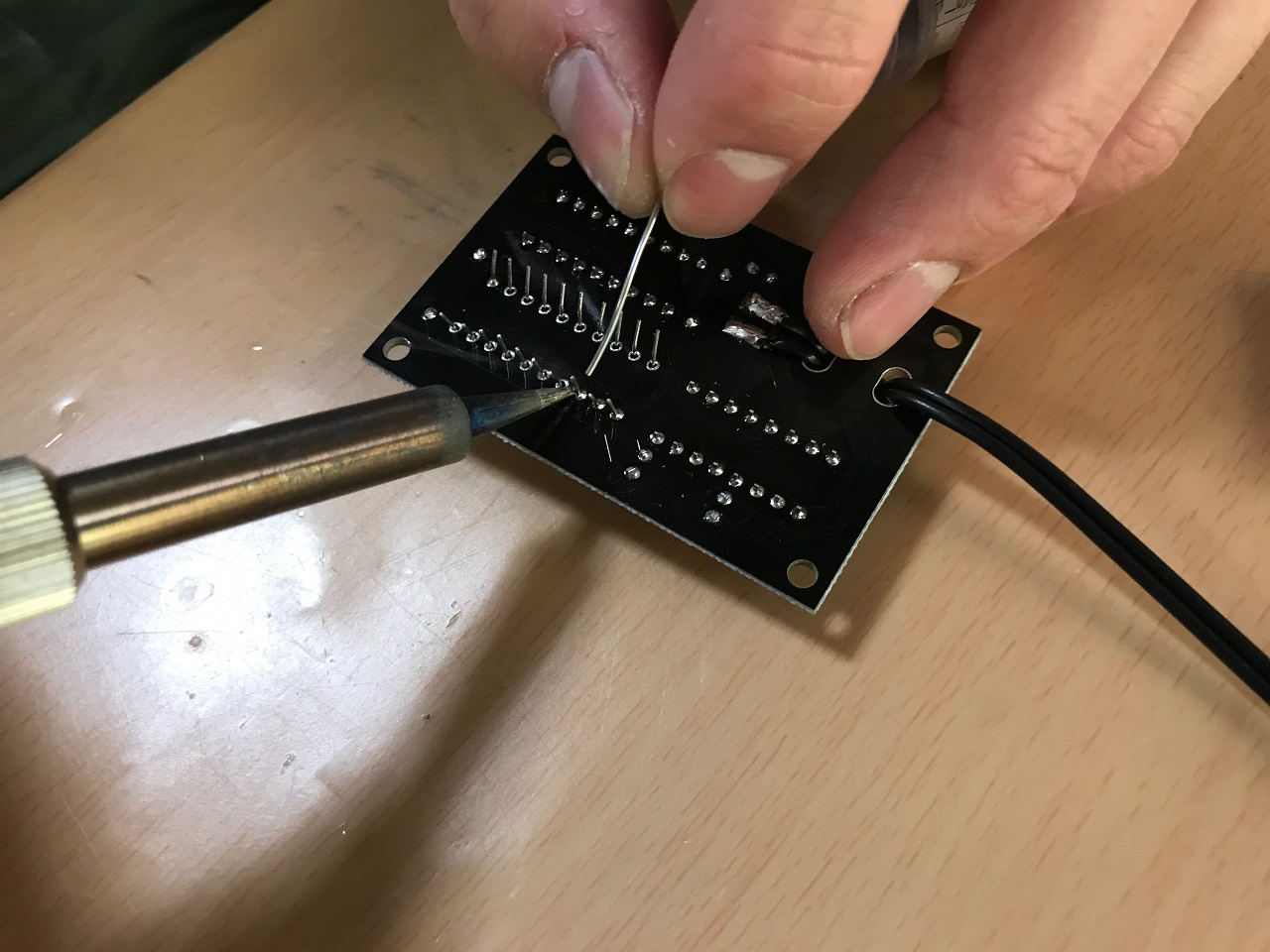
5) 制御IC取付け
- リード(足)をペンチ等で整形し、基板の穴 U2 に挿します。
- 裏面をはんだ付けします。
先に対角の2ピンをはんだ付け後、残りのピンをはんだ付けします。
【注意】
・ICの向きに注意します。切り欠き(半円形のくぼみ)を左側にします。
・ICは静電気で壊れることがありますので、金属(蛇口・アルミサッシ等)に触れてから扱います。
6) バーLED取付け
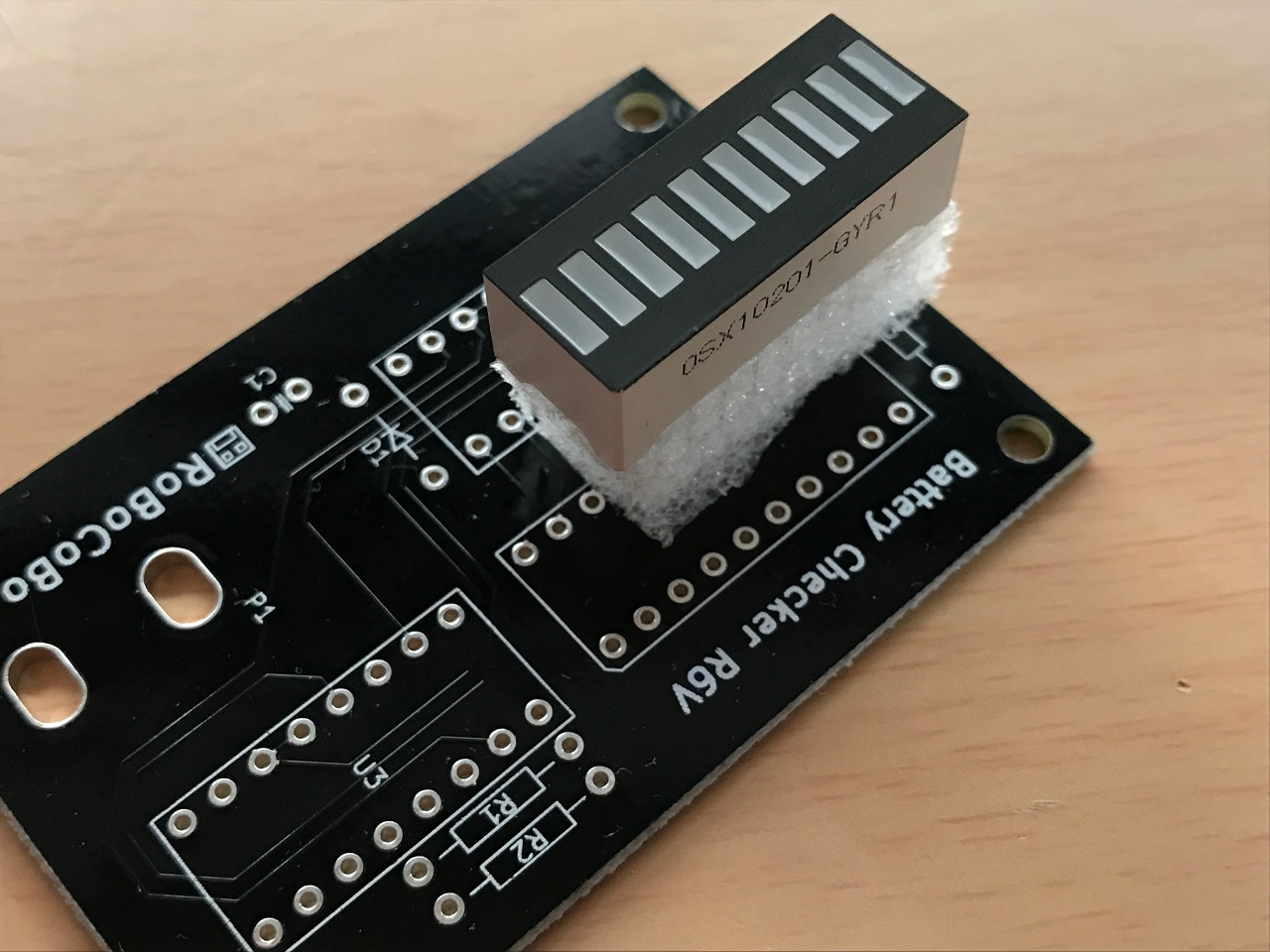
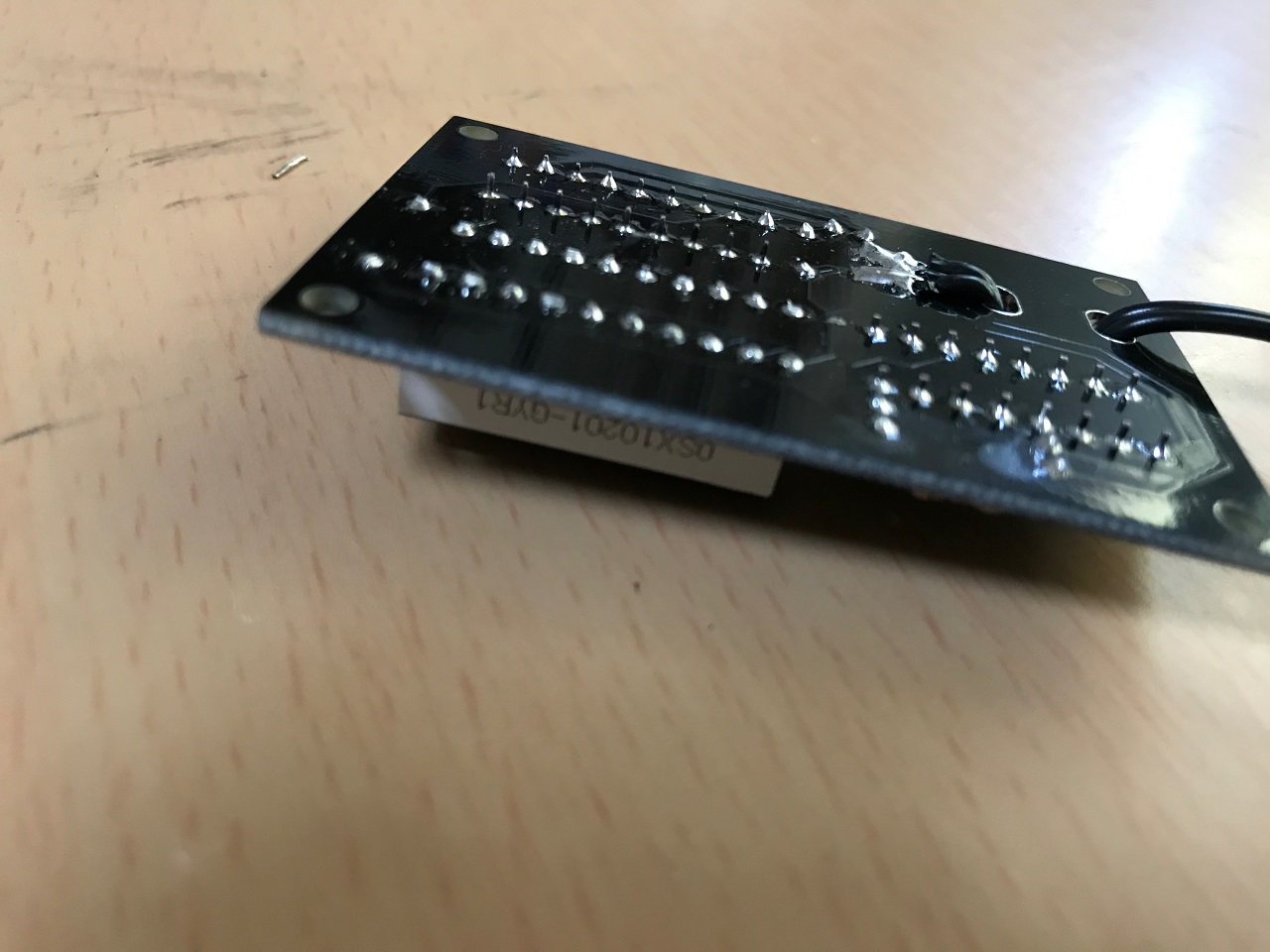
- 基板の穴 U1 に挿します。
- 裏面でリードをハの字に開き、はんだ付けします。
先に対角の2ピンをはんだ付け後、残りのピンをはんだ付けします。
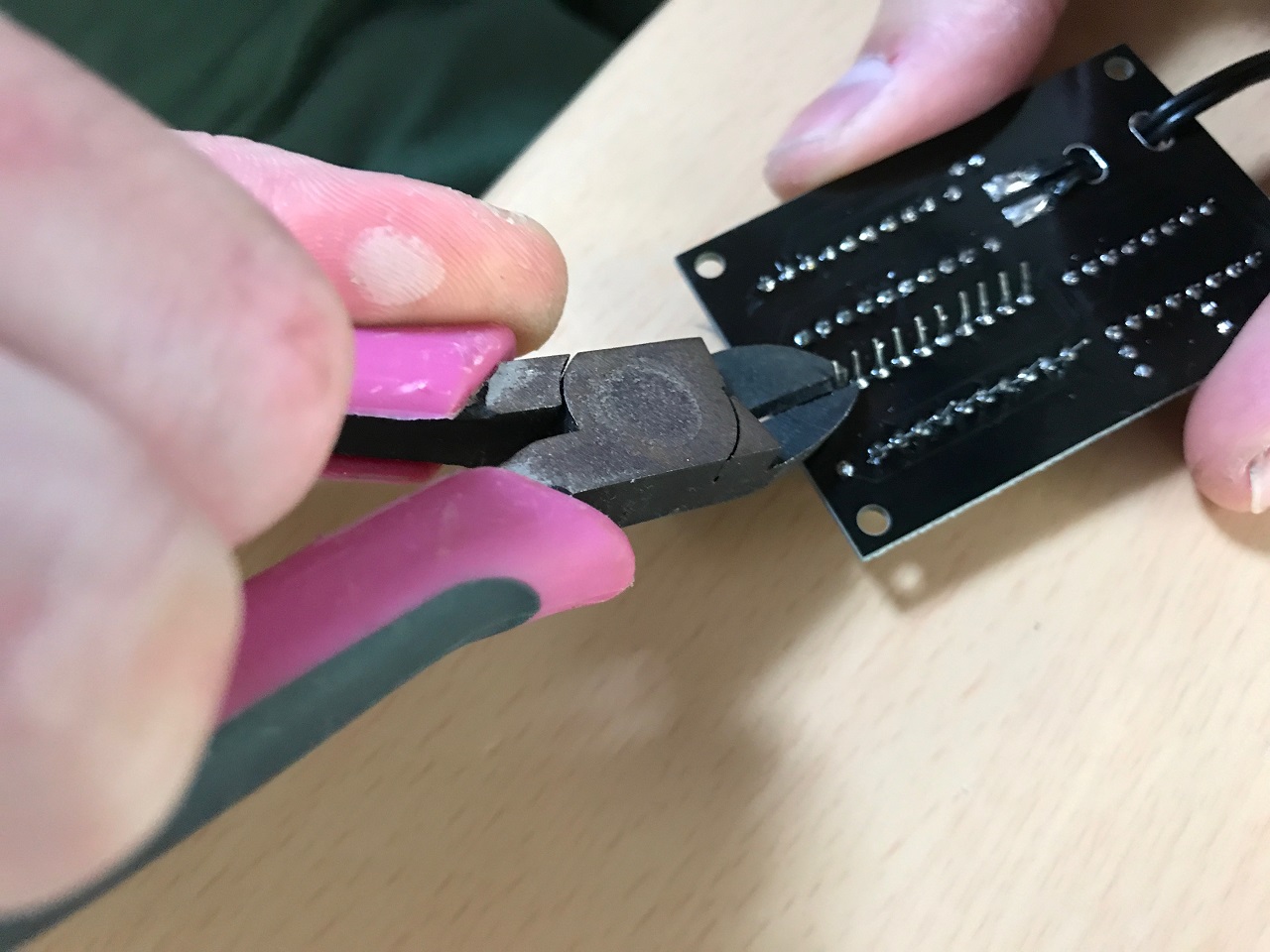
- 余分なリードをニッパで切ります。
【注意】
LEDの向きに注意します。面取り(斜め45°の角)を右上にします。
7) ケース組立て
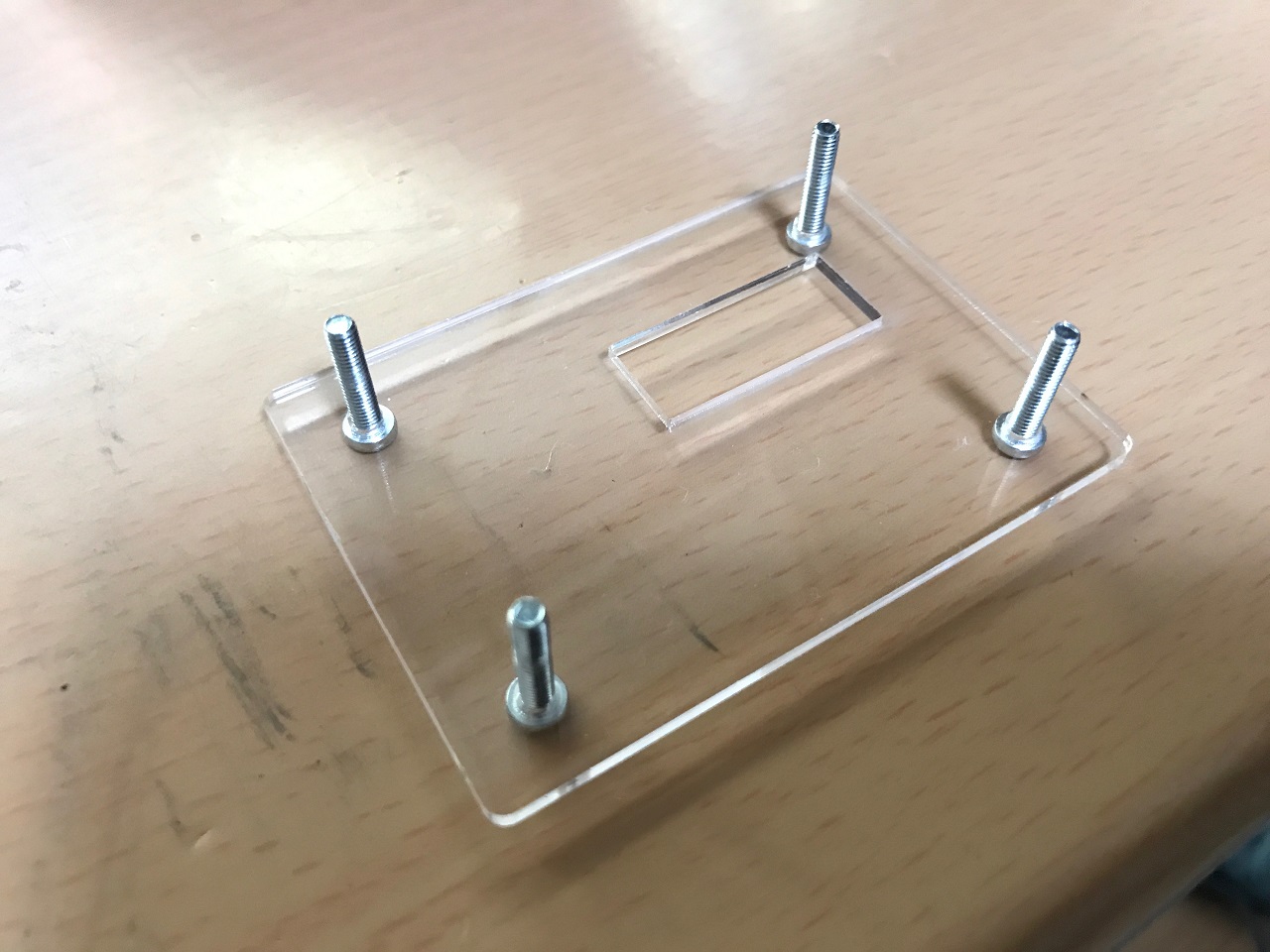
- 天板の表面からねじ4本を挿し、逆さに置きます。
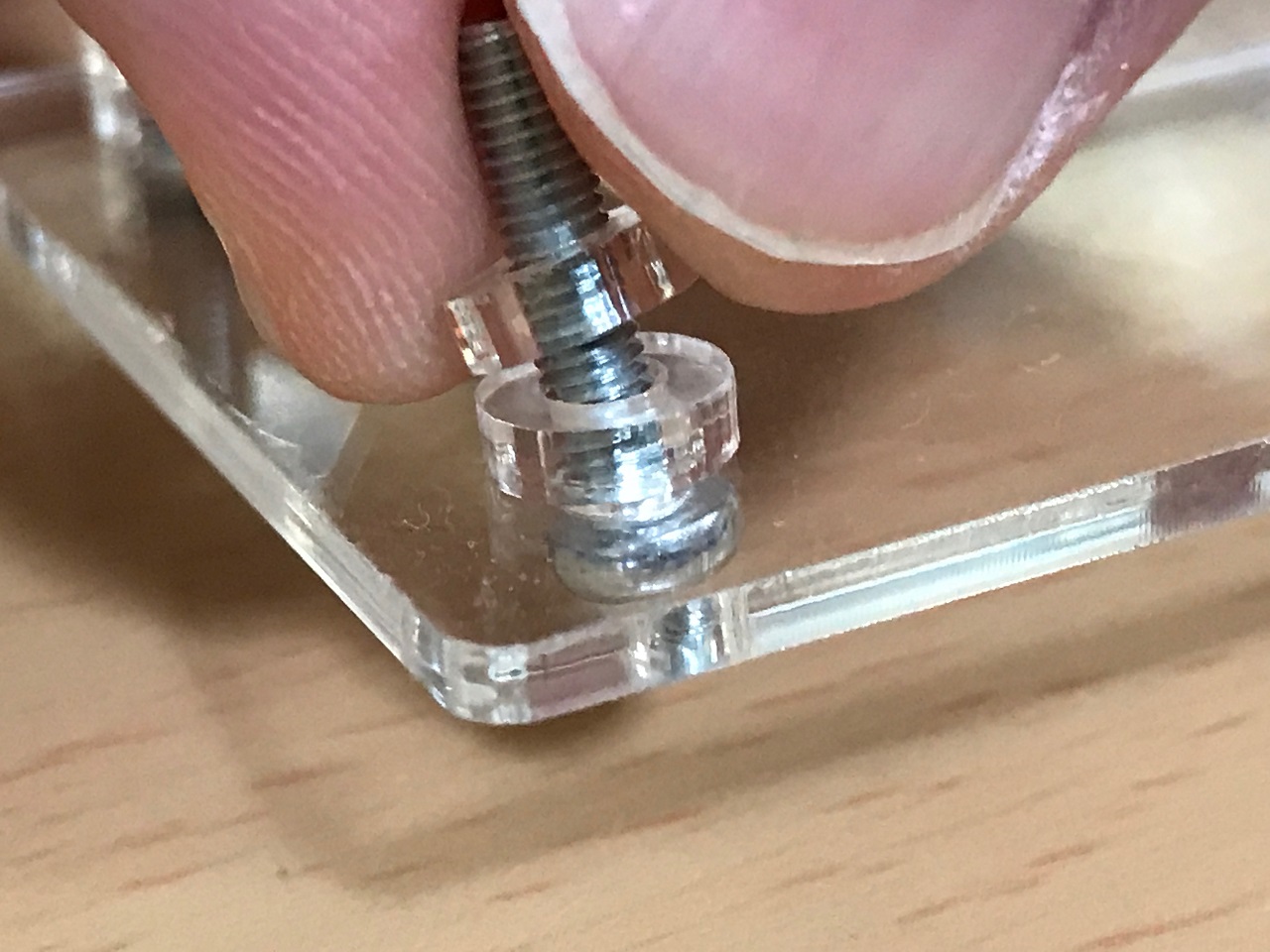
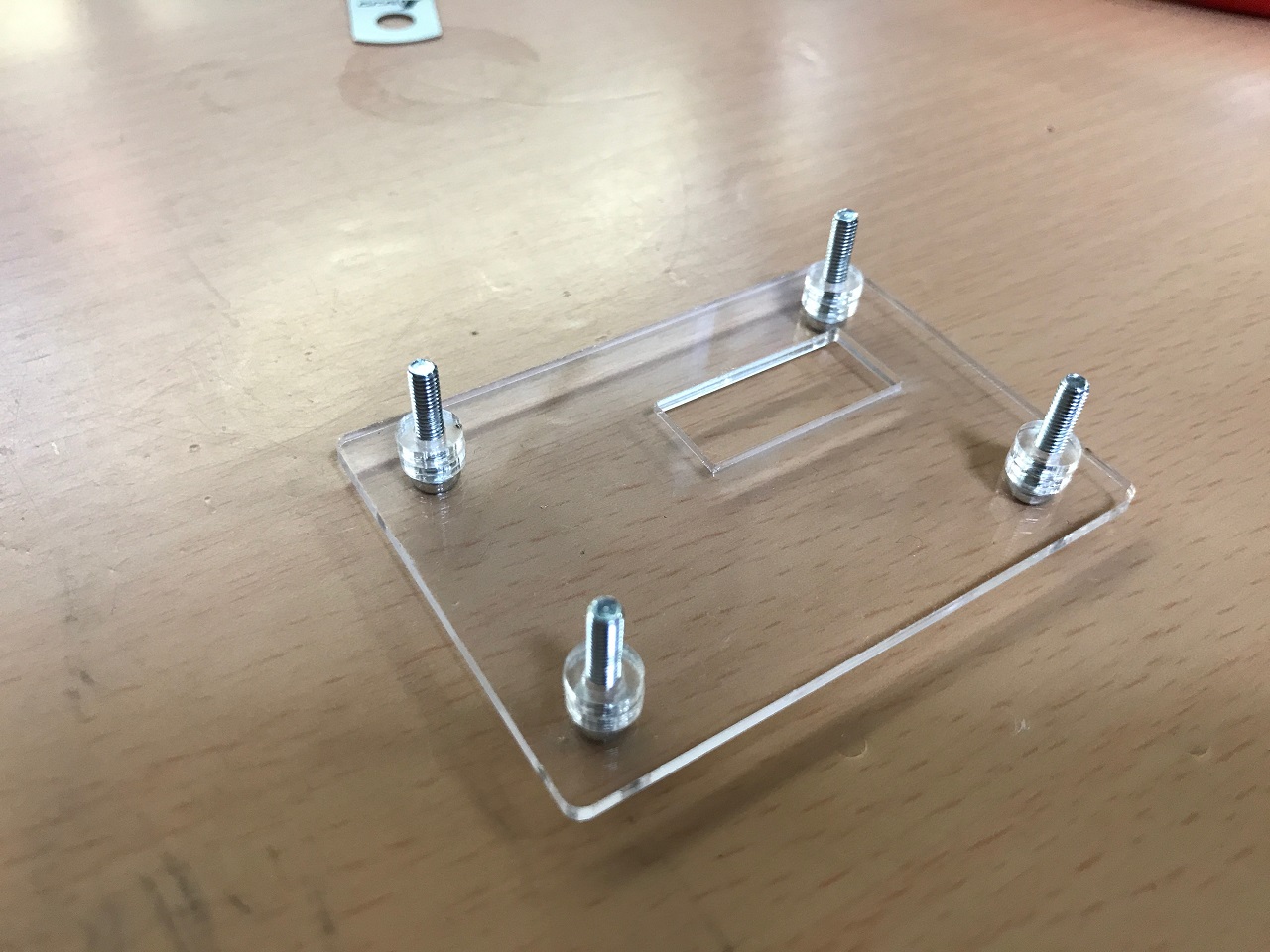
- ワッシャーを2枚ずつ重ねます。
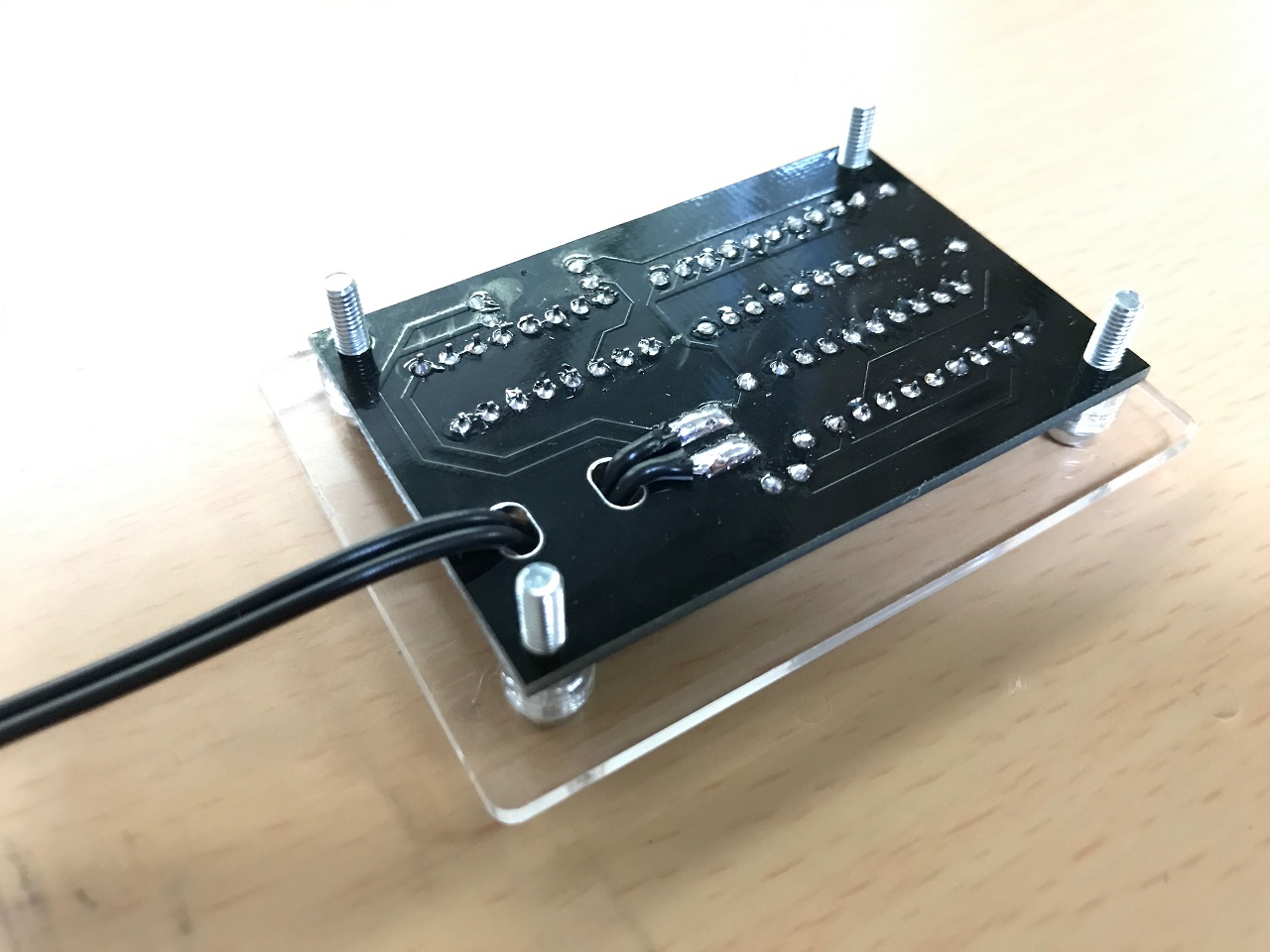
- LEDが天板の窓に合うよう、基板を逆さにして通します。
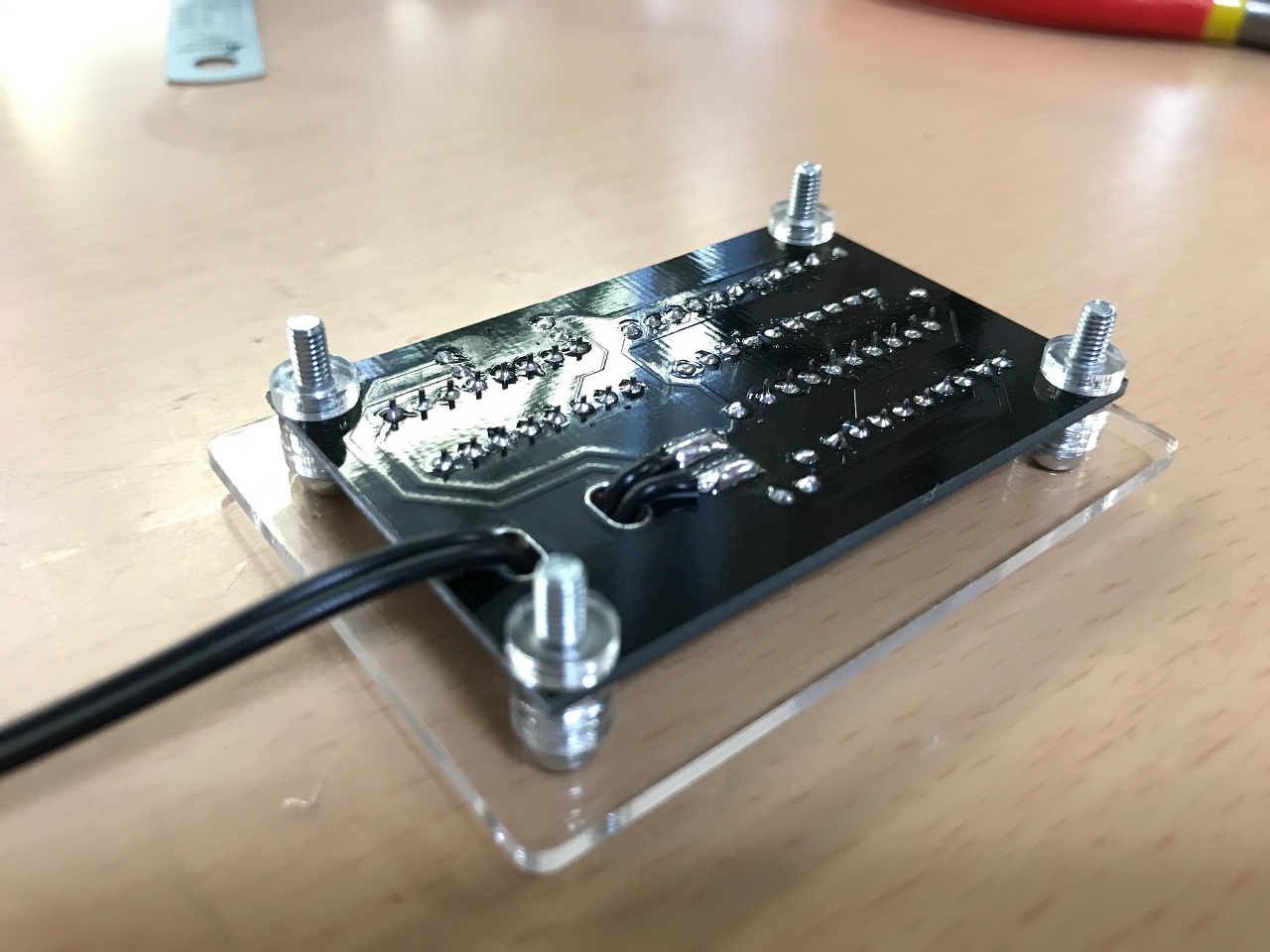
- ワッシャーを1枚ずつ通します。
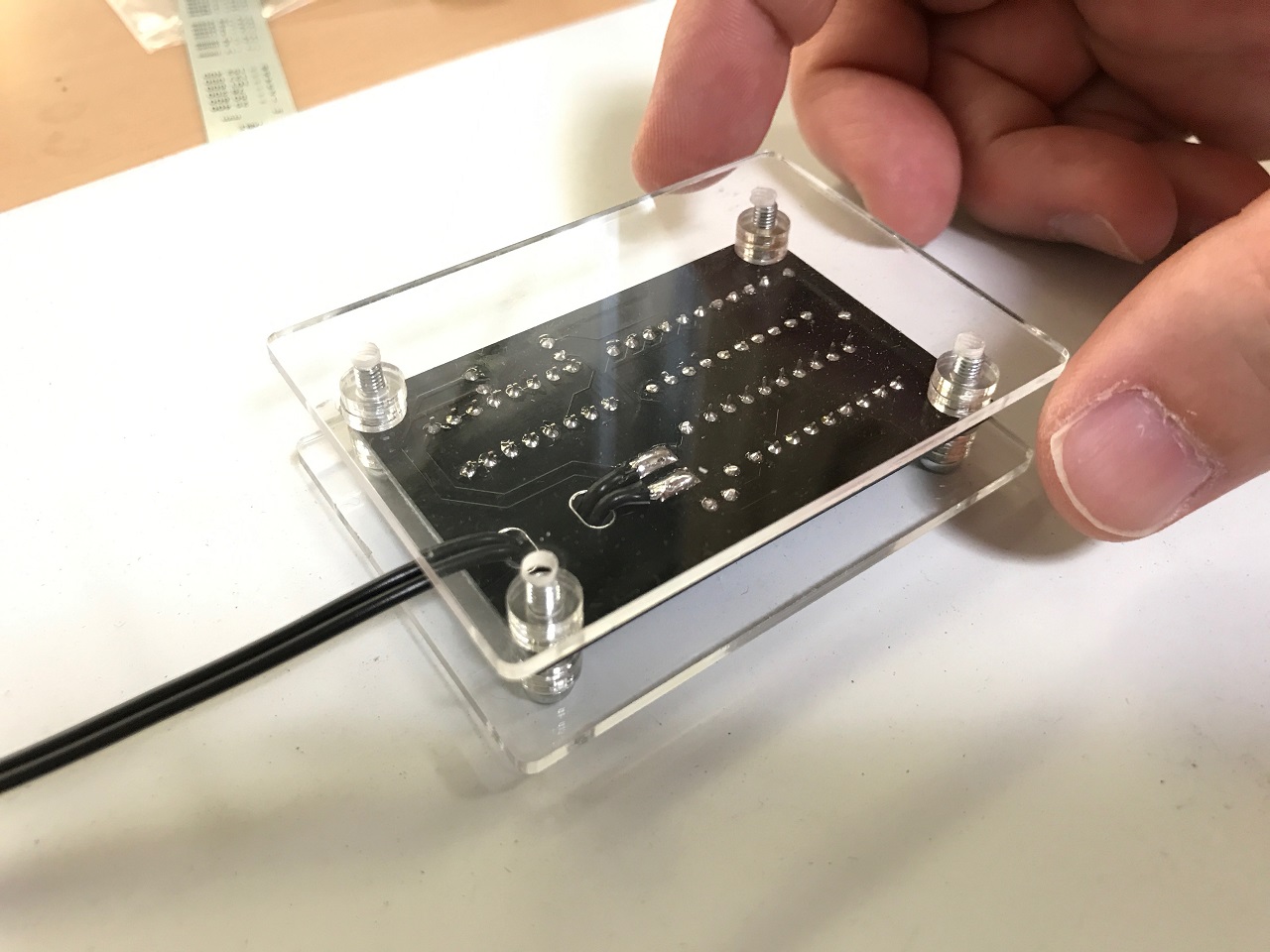


- 裏板を置き、全体を手で持ち上げ、ネジ留めします。
8) 動作確認
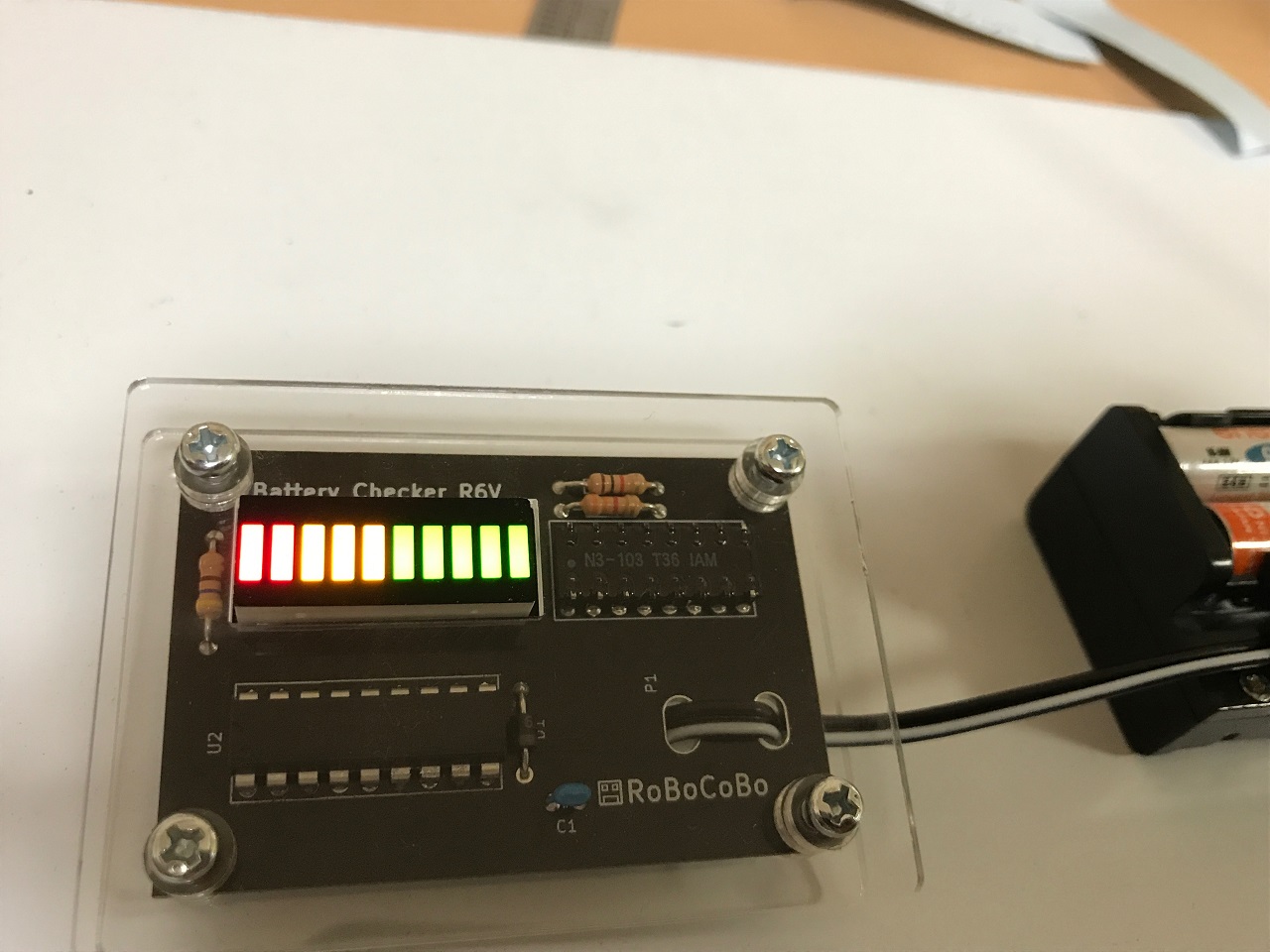
取扱説明書に従い、電池パワーが正しく計測できるか確認します。
〔設計・製作〕 ロボット教室 × RoBoCoBo
RoBoCoBo(ロボコボ)は、中野と佐藤が立ち上げた実体の無いロボット工房です。
RoBoCoBo 中野・佐藤
登録:
コメント (Atom)